
Přesunout panel
Nabídka
Položky | Popis | |
|---|---|---|
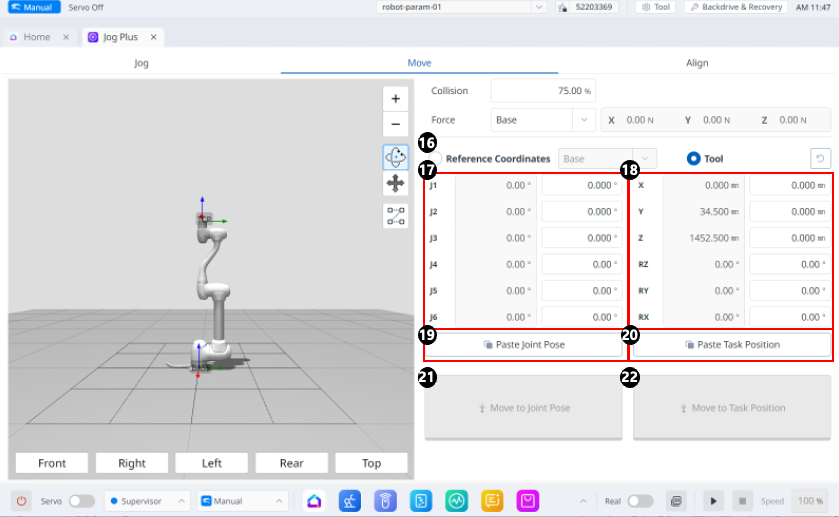
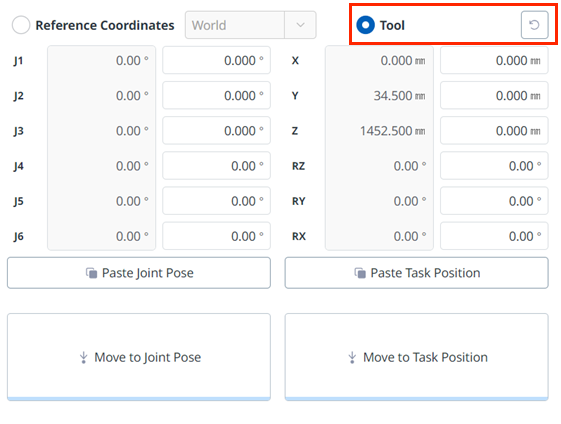
16 | Vyberte referenční souřadnicový systém | Vyberte referenční souřadný systém, který se má použít pro souřadnice úkolu na obrázku 18. Můžete zvolit souřadnice základny, světa nebo uživatele. |
17 | Držení kloubů | Zobrazuje aktuální polohu robota a polohu cílového kloubu. |
18 | Pozice úkolu | Zobrazuje aktuální pozici robota a pozici cílového úkolu, která odpovídá vybranému referenčnímu souřadnému systému. |
19 | Vložte polohu kloubu | Vložte hodnotu pozice zkopírovanou do schránky do panelu držení těla kloubu. |
20 | Vložte pozici úlohy | Vložte hodnotu pozice zkopírovanou do schránky do panelu pozice úlohy. |
21 | Tlačítko pohybu kloubu | Toto tlačítko způsobí, že se robot přesune do cílového držení kloubu. |
22 | Tlačítko přesunout úlohu | Toto tlačítko způsobí, že se robot přesune do pozice cílového úkolu. |
Nastavení úhlu pro pohyb
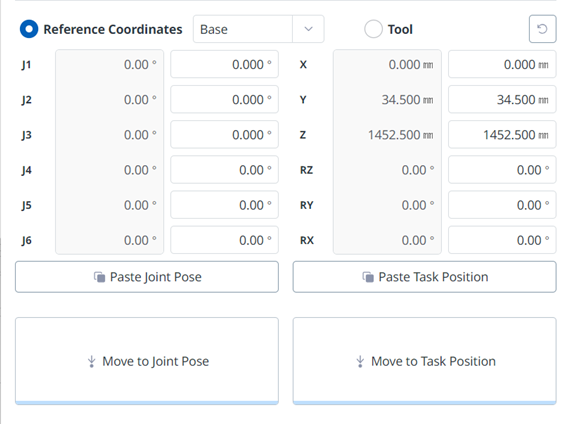
Chcete-li pohybovat robotem v určitém úhlu, postupujte takto:
Vyberte kartu přesunout.
Zadejte cílový úhel kloubu robota. (J4 je u modelů řady P deaktivován)
Povolte reálný režim.
Klepnutím a přidržením tlačítka přesunout do odpovídající polohy spoje nastavte úhel kloubu robota.
Nastavení základních referenčních souřadnic pro pohyb
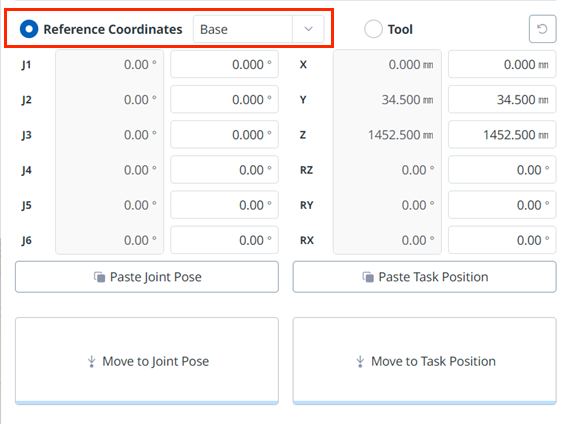
Chcete-li robota přesunout na základě jeho základních souřadnic, postupujte takto:
Vyberte kartu přesunout a referenční souřadnice.
Vyberte souřadnici displeje jako základnu.
Klepnutím a přidržením tlačítka přesunout na odpovídající pozici úlohy se přesunete na nastavené souřadnice.
Nastavení referenčních souřadnic pro pohyb
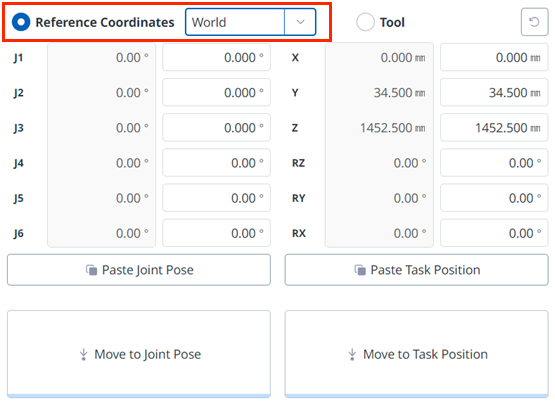
Chcete-li přesunout robota na základě světových souřadnic, postupujte takto:
Vyberte kartu přesunout a referenční souřadnice.
Vyberte možnost Svět jako souřadnice zobrazení a vyberte kartu Svět.
Nakonfigurujte pózu pro pohyb s odkazem na souřadnice světa.
Klepnutím a přidržením tlačítka přesunout na odpovídající pozici úlohy se přesunete na nastavené souřadnice.
Nastavení souřadnic pro pohyb na základě nástroje
Chcete-li robota přesunout na základě souřadnic nástroje, postupujte takto:
Vyberte kartu přesunout a vyberte kartu Nástroj.
Nakonfigurujte pózu pro pohyb s odkazem na nástroj.
Klepnutím a přidržením tlačítka přesunout na odpovídající pozici úlohy se přesunete na nastavené souřadnice.