
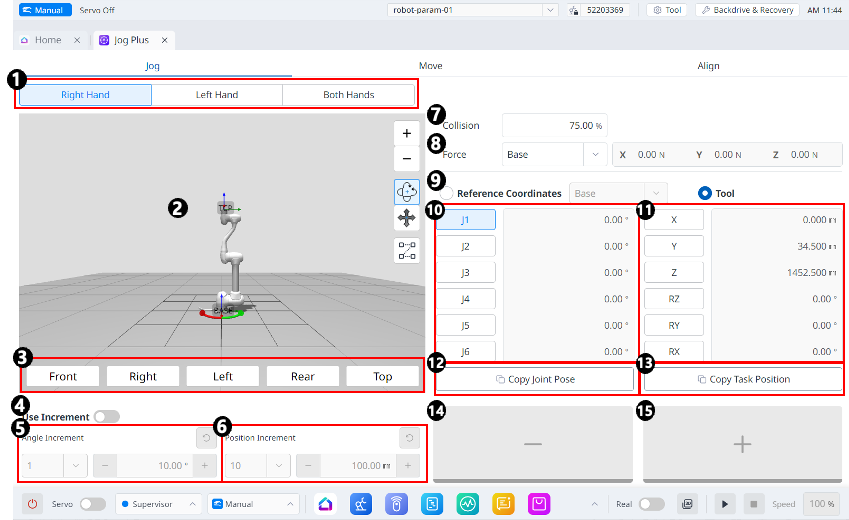
Jog Panel
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Vyberte typ panelu | Můžete zvolit umístění tlačítka přesunout. |
| 2 | 3D simulace | Jedná se o 3D prohlížeč, kde můžete vidět, jak robot vypadá. |
| 3 | Zarovnání simulátoru | Tuto část můžete použít k řízení simulátoru. |
| 4 | Použijte přírůstek | Toto tlačítko umožňuje aktivovat přírůstky úhlu nebo polohy. |
| 5 | Přírůstek úhlu | Tato část je místem, kde je nastaven přírůstek úhlu na vybrané ose. |
| 6 | Přírůstek polohy | Tato část je místem, kde je nastaven přírůstek polohy na vybrané ose. |
| 7 | Kolize | Toto pole je místo, kde nastavíte kolizi robota. |
| 8 | Monitorování síly | Tato část je místem, kde nastavíte síly v osách X, Y a z na základě základny, nástroje, světa, referencí a mimo jiné. |
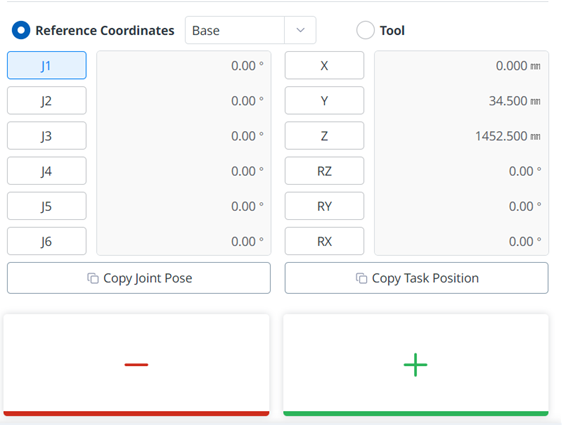
| 9 | Vyberte referenční souřadnicový systém | Vyberte referenční souřadný systém, který se má použít pro souřadnice úkolu na obrázku 11. Můžete zvolit souřadnice základny, světa nebo uživatele. |
| 10 | Spojovací panel | Můžete vybrat osu spoje, kterou chcete zajovat. |
| 11 | Panel úloh | Můžete vybrat osu úkolu, kterou chcete zajovat. |
| 12 | Tlačítko pozice kopie J. | Toto tlačítko umožňuje kopírovat Pose J. |
| 13 | Tlačítko kopírovat pózu X. | Toto tlačítko umožňuje kopírovat Pose X. |
| 14 | Tlačítko přesunout - | Robot se může pohybovat ve směru - na základě každé osy. V této době můžete zjistit směr - a + na 3D simulaci na levé straně. |
| 15 | Stiskněte tlačítko + | Robot se může pohybovat ve směru + na základě každé osy. V této době můžete zjistit směr - a + na 3D simulaci na levé straně. |
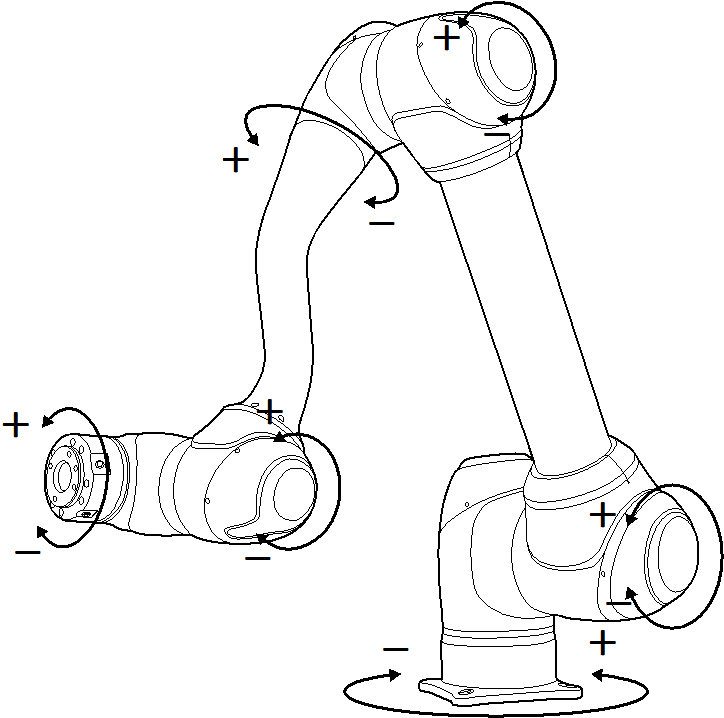
Provedení na základě spojení robota
Chcete-li nastavit úhel na základě kloubu robota, postupujte takto:
Vyberte osu (J1-J6) pro nastavení úhlu na panelu spoje.
Stisknutím a přidržením tlačítek směru (
 ,
,  ) nastavte úhel odpovídající osy.
) nastavte úhel odpovídající osy.
Provedení na základě základny robota

Chcete-li robota přesunout na základě jeho základních souřadnic, postupujte takto:
Vyberte základnu jako referenční souřadný systém.
Na panelu úlohvyberte osu (X~RX), pro kterou chcete upravit úhel.
Stisknutím a přidržením tlačítka směru (+,-) přesuňte odpovídající osu.
Provádění na základě světových souřadnic

Chcete-li přesunout robota na základě světových souřadnic, postupujte takto:
Vyberte svět jako referenční souřadný systém.
Na panelu úlohvyberte osu (X~RX), pro kterou chcete upravit úhel.
Stisknutím a přidržením tlačítka směru (+,-) přesuňte odpovídající osu.
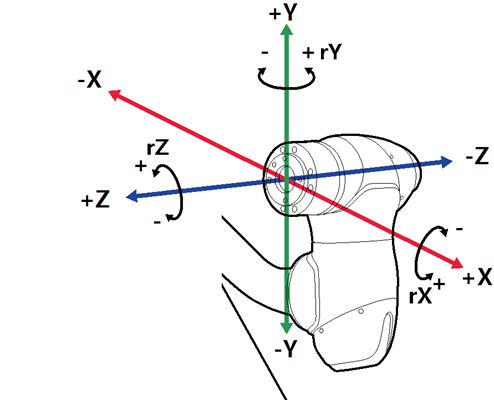
Provádění na základě nástroje robota

Chcete-li robota přesunout na základě nástroje robota, postupujte takto:
Vyberte nástroj jako referenční souřadný systém.
Na panelu úlohvyberte osu (X~RX), pro kterou chcete upravit úhel.
Stisknutím a přidržením tlačítka směru (+,-) přesuňte odpovídající osu.
Poznámka
Bezpečnostní oblast se ve virtuálním režimu nepoužívá.
RX, Ry a Rz se provádějí podle TCP (pozice středu nástroje).