
Domácí pozice a kokpit
Výchozí poloha
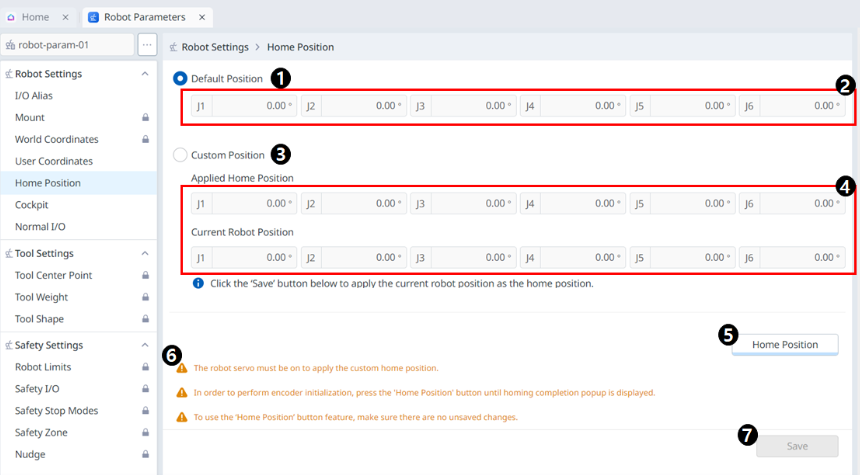
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Možnost výchozí pozice | Toto je část, kde můžete vybrat výchozí možnost pozice. |
| 2 | Výchozí hodnota pozice | Jedná se o hodnoty, které odpovídají výchozí pozici, z nichž všechny jsou 0. |
| 3 | Možnost vlastní pozice | To vám umožní vybrat možnost vlastní pozice. |
| 4 | Hodnota vlastní pozice | Můžete zkontrolovat aktuálně nastavenou hodnotu vlastní pozice a aktuální polohu robota. |
| 5 | Výchozí poloha | Toto tlačítko umožňuje nastavit výchozí pozici nebo vlastní pozici, kterou jste nastavili jako výchozí pozici. |
| 6 | Varovná zpráva | Upozornění při nastavování tohoto nastavení. |
| 7 | Uložit | Toto tlačítko umožňuje uložit hodnoty nastavení. |
Varování
Při výměně robota nebo spoje robota je nutné resetovat vlastní výchozí polohu.
Kokpit
Přímé učení se používá k držení konce robota rukama, aby se robot posul a táhl do požadované pozice a aplikovali pózu na aktuálně vybraný pohyb. Existují dvě metody přímé výuky.
Freedrive: Každý spoj se pohybuje ve směru, kterým uživatel použil sílu
Omezený pohyb: Konec robota se pohybuje nebo otáčí pouze ve směru nastaveném v omezeném pohybu, i když je síla aplikována z náhodného směru
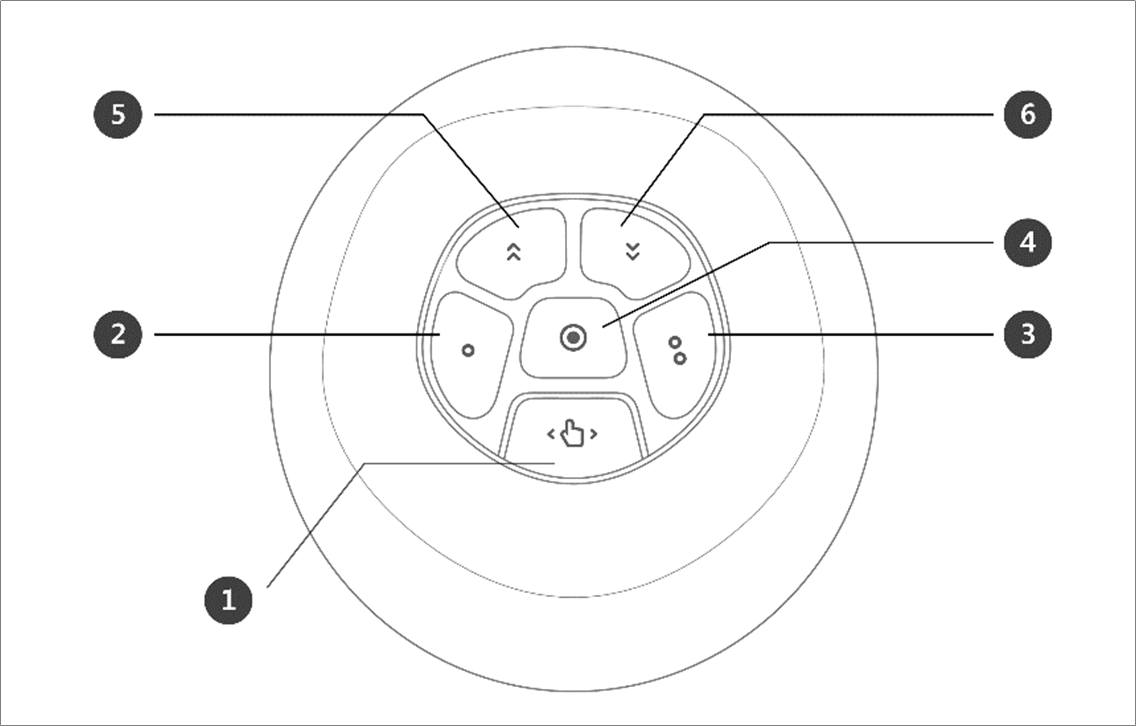
Freedrive
Po stisknutí tlačítka 1 se aktivuje režim Freedrive, který umožňuje volný pohyb robota. Každý spoj se pohybuje ve směru, kterým uživatel použil sílu. Po uvolnění tlačítka nelze robota pohybovat ručně.
Během přímého učení kontrolka LED robota bliká azurově.
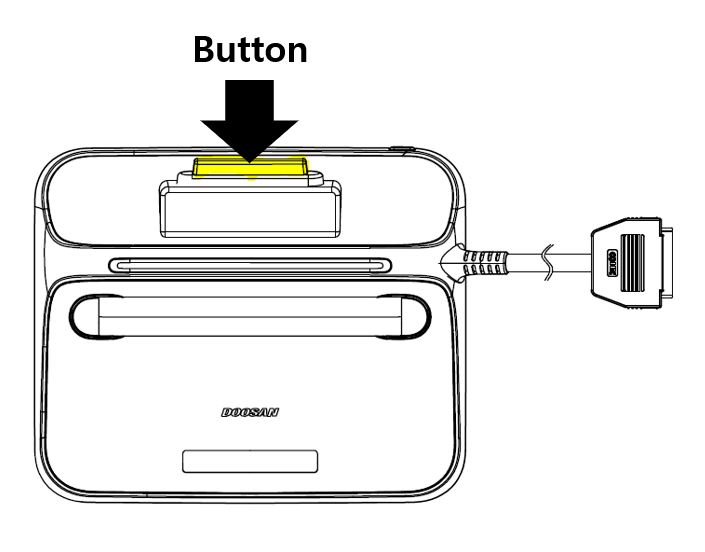
Stisknutím tlačítka ručního vodítka na zadní straně závěsného zařízení Teach se aktivuje režim Freedrive, stejně jako stisknutím tlačítka 1, a robot lze volně pohybovat.
Omezený pohyb
Při stisknutí tlačítka 2 a tlačítka 3 se konec robota pohybuje pouze ve směru, který odpovídá podmínce omezení, i když je síla použita z náhodného směru. Podmínka omezení může být nastavena na 2 z 4 podmínek na následujícím obrázku: Omezená osa z , omezená rovina, omezená plocha a omezení směru.
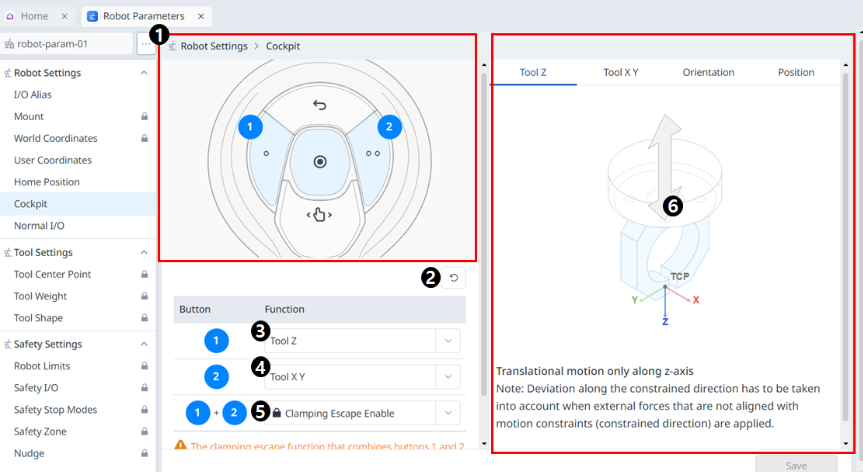
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Obrázek v kokpitu | Toto je obrázek pro nastavení Cockpit. |
| 2 | Resetovat | Toto tlačítko umožňuje inicializovat nastavené hodnoty. |
| 3 | 1 nastavení tlačítka | Toto je část, kde můžete vybrat funkci, kterou chcete nastavit pro tlačítko 1. |
| 4 | 2 nastavení tlačítka | Toto je část, kde můžete vybrat funkci, kterou chcete nastavit pro tlačítko 2. |
| 5 | Nastavení tlačítek 1 + 2 | Zde si můžete vybrat, zda chcete povolit upnutí tlačítek 1+2. |
| 6 | Obrázek průvodce | Vodící obrázek pro položky nastavení kokpitu. |
Získání stavu tlačítka Cockpit
Uživatel může získat informace o tom, zda je tlačítko Cockpit stisknuto nebo uvolněno.
Robot poskytuje funkci pro ovládání tlačítka Cockpit, což umožňuje jeho použití v různých aplikacích.
"Monitorovací data" v komunikačním API poskytuje informace o tlačítku Cockpit.
Pokud stisknete tlačítko Cockpit robota nebo naopak, můžete jej zjistit pomocí rozhraní DRL API.
DRL API: Get_cockpit_input (viz Programovací příručka).
Paramy: (int) index
Vrácení: (int) 1: Stisknuto (tlačítko je stisknuto), 0: Uvolněno (tlačítko není stisknuto)