Mezerový limit a nastavení zón
Běžné
Efektivní oblast lze vybrat jako interiér/exteriér.
Typ tvaru lze vybrat jako kulový, válec, Cuboid, nakloněný Cuboid nebo Vícerovinný box. Další informace naleznete v tématu Přehled mezerníku a nastavení zóny.
Nastavení mezerního limitu
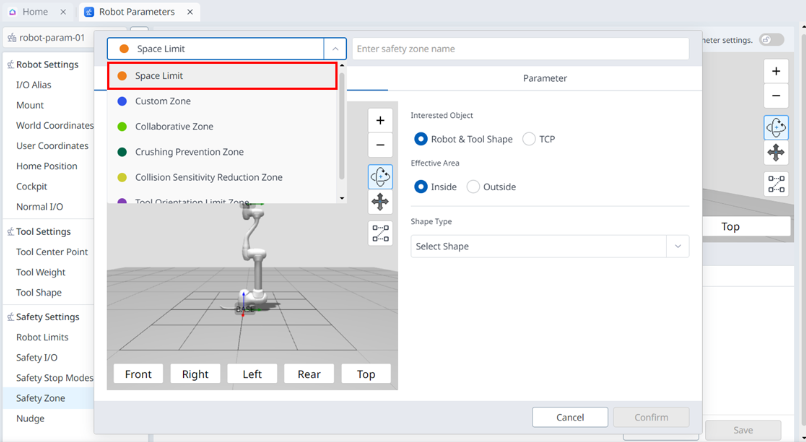
Mezerník je funkce, která nastavuje virtuální plot v nejvzdálenější oblasti robota. Robot můžete ovládat bez nastavení mezerního limitu, ale doporučuje se nastavit limit prostoru pro bezpečné použití.
Můžete ji nastavit výběrem možnosti „mezerník“ v parametrech robota > bezpečnostní zóna > Přidat > vlevo nahoře v překryvném okně.
Můžete vybrat jeden z robota a nástroje tvar / TCP pro zajímavý objekt.
Robot musí být v oblasti mezního prostoru nastavené tak, aby byl nastaven normálně.
Poznámka
V závislosti na tom, jak ji nastavíte, existuje výchozí hodnota rozšíření prostoru.
Nastavení tvaru nástroje, při výběru 'TCP' pro kontrolu, hodnota okraje TCP 0mm
Nastavení tvaru nástroje, při výběru možnosti „Robot & Tool Shape“ pro kontrolu, hodnota okraje TCP 0mm
Tvar nástroje není nastaven, při výběru 'TCP' pro kontrolu, hodnota okraje TCP 0mm
Tvar nástroje není nastaven, při výběru 'Robot & Tool Shape' pro kontrolu, hodnota okraje TCP 60mm
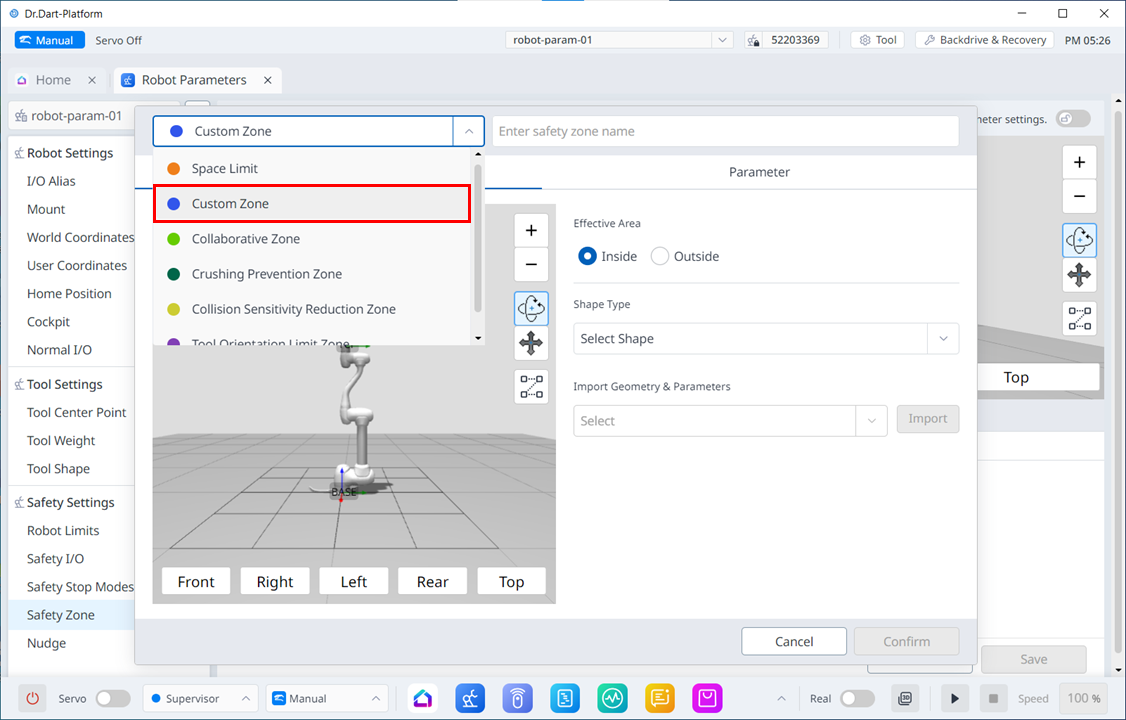
Nastavení vlastní zóny
Custom Zone je nejflexibilnější bezpečnostní zóna, kde si můžete libovolně nastavit bezpečnostní parametry. Můžete nakonfigurovat všechna nastavení, jako jsou limity robota, režim nouzového zastavení, rychlost spoje a omezení úhlu, aby vyhovovaly vašim potřebám.
Můžete ji nastavit výběrem položky „vlastní zóna“ v parametrech robota > bezpečnostní zóna > Přidat > překryvné okno vlevo nahoře.
Poznámka
Pokud je protokol TCP v poloze, kde se překrývají více oblastí, platí pro každou bezpečnostní funkci individuálně následující pravidla.
Normální režim
Nejsou-li žádné zóny nastaveny na zónys vysokou prioritou, bude nejomezenější mezní hodnotou bezpečnosti překrývajících se zón referenční hodnota kontroly.
Pokud je jedna zóna nastavena jako zóna s vysokou prioritou, mezní hodnotou pro danou zónu je referenční hodnota kontroly.
Pokud jsou jako zóny s vysokou prioritou nastaveny více než dvě zóny, bude nejuvolněnější mezní hodnotou bezpečnosti zón kontrolní kritéria.
Snížit režim
Nejsou-li žádné zóny nastaveny na zónys vysokou prioritou, bude nejomezenější mezní hodnotou bezpečnosti překrývajících se zón referenční hodnota kontroly.
Pokud je jedna zóna nastavena na zónu s vysokou prioritou, volba přepsání pro danou zónu určuje referenční hodnotu kontroly.
Není-li možnost přepsání zaškrtnuta, bude nejomezenější mezní hodnotou bezpečnosti mezi zónou s vysokou prioritou a limitem globálního snížení referenční hodnota kontroly.
Pokud je zaškrtnuta možnost přepsání, je zóna s vysokou prioritou referenční hodnotou kontroly.
Pokud je v zóně s vysokou prioritou nastavena více než jedna zóna, volba přepsání pro danou zónu určuje referenční hodnotu kontroly.
Není-li možnost přepsání zaškrtnuta pro některou z oblastís vysokou prioritou, bude pro zónu s nejvyšší prioritou, pro kterou není zaškrtnuta možnost přepsání, a nejvíce omezenou hodnotou limitu bezpečnosti pro globální snížení limitu bude referenční hodnota kontroly.
Pokud je zaškrtnuta možnost přepsání pro všechny zónys vysokou prioritou, bude nejuvolněnější mezní hodnotou bezpečnosti mezi zónami s vysokou prioritou kontrolní kritéria.
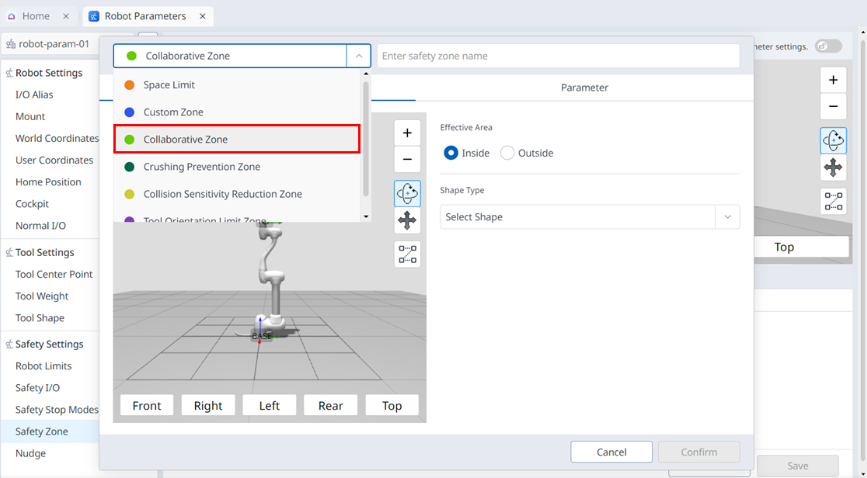
Nastavení zóny spolupráce
Kolaborativní zóna je zóna určená pro bezpečnou práci s roboty. Poskytuje limity robota, jako jsou rychlosti zpomalování potřebné pro práci v blízkém dosahu a nastavení režimu bezpečného zastavení.
Můžete ji nastavit výběrem možnosti „kolaborativní zóna“ v parametrech robota > bezpečnostní zóna > Přidat > vlevo nahoře.
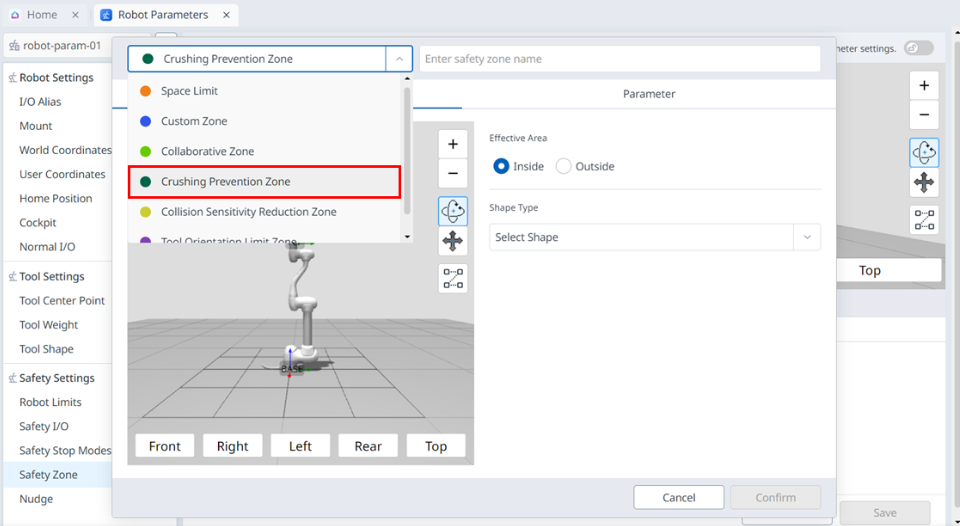
Nastavení zóny prevence drcení
Zóna prevence drcení je zóna, která zabraňuje nebezpečí rozdrcení, ke kterému může dojít mezi robotem a jinými předměty. V této zóně, když dojde k porušení kolize a limitu vnější síly, je režim bezpečnostního zastavení nastaven na RS1 (Reflex Stop) a citlivost kolize je nastavena na 100 %, takže když je detekována kolize, robot reaguje co nejcitlivě na vnější sílu a poté bezpečně zastaví plovoucí reakcí.
Můžete ji nastavit výběrem možnosti „zóna prevence propláchnutí“ v parametrech robota > bezpečnostní zóna > Přidat > vlevo nahoře.
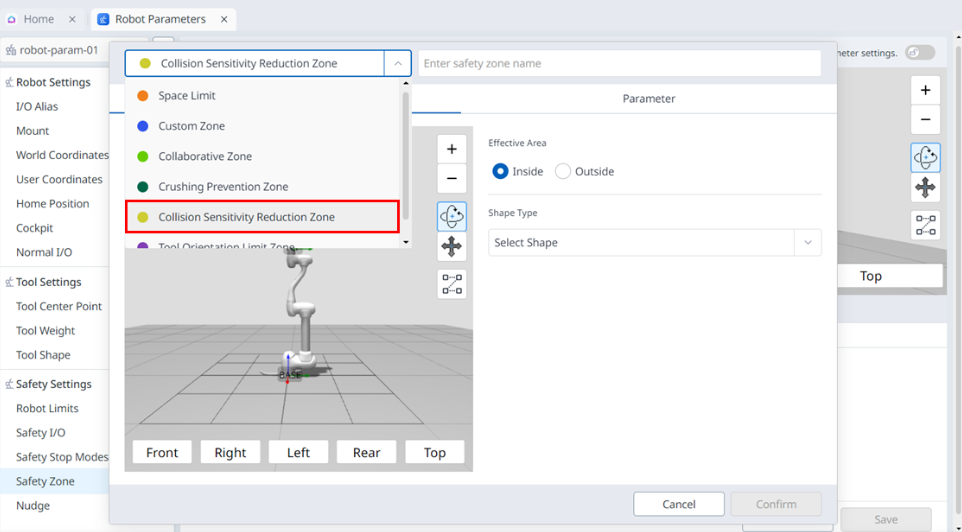
Nastavení zóny snížení citlivosti kolize
Zóna snížení citlivosti na kolizi je zóna, která upravuje citlivost detekce kolize robota při práci s různými materiály nebo povrchy. Poskytuje nastavení citlivosti na sílu a kolizi.
Můžete ji nastavit výběrem možnosti „zóna snížení citlivosti na kolizi“ v parametrech robota > bezpečnostní zóna > Přidat > vlevo nahoře v překryvném okně.
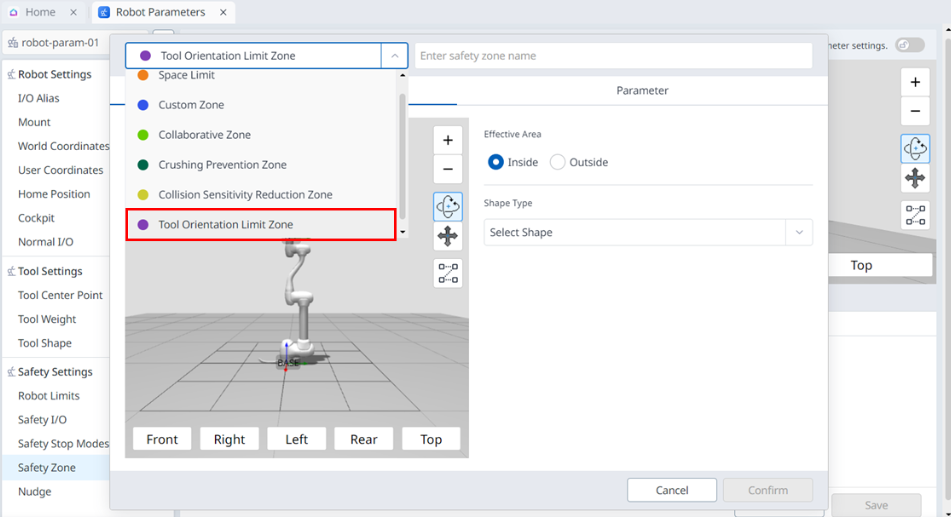
Nastavení zóny limitu orientace nástroje
Zóna limitu orientace nástroje je zóna, která omezuje orientaci TCP. Zajišťuje, že TCP směřuje specifickým směrem a zabraňuje tomu, aby směřoval nebezpečným směrem definováním směru a úhlu.
Můžete ji nastavit výběrem možnosti „zóna limitu orientace nástroje“ v parametrech robota > bezpečná zóna > Přidat > vlevo nahoře v překryvném okně.