Co je to vlastně robot?
Funkční limity každé řady robotů
Různé řady robotů (A, AS, E, M/H, P Series) omezují použití funkcí takto:
Aktuální: Používá se proud motoru umístěný na každém kloubu.
Na základě FTS: Používá se FTS (snímač momentu síly) umístěný na konci robota.
Na bázi JTS: Používá se JTS (snímač momentu kloubu) umístěný na každém kloubu.
Vlastnosti | Řada a /E (na základě proudu) | A Series s (proud, na bázi FTS) | Řada M (na bázi JTS) | Řada H (na bázi JTS) | Řada P (na bázi JTS) |
|---|---|---|---|---|---|
Přímé učení
| O | O (na základě proudu) | O | O | O |
Přímé učení
| X | O (na základě FTS) | O | O | O |
Detekce kolizí | O | O (na základě proudu) | O | O | O |
Měření pozice instalace | X | O (na základě FTS) | O | X (robot může být instalován pouze na podlaze) | X (robot může být instalován pouze na podlaze) |
Měření hmotnosti nástroje | X | O (na základě FTS) | O | O | O |
Měření hmotnosti obrobku | X | O (na základě FTS) | O | O | O |
Funkce posunutí | X | X | O | O | O |
Řízení síly | O (nastavení je k dispozici pouze ve třech překladových směrech, bez otáčení) | O (na základě FTS) | O | O | O |
Kontrola dodržování předpisů | O (nastavení je k dispozici pouze ve třech překladových směrech, bez otáčení) | O (na základě FTS) | O | O | O |
Funkční limity monitorování síly pro každou řadu robotů
Závěsný přístroj Teach a DART-Studio lze použít k monitorování silových dat. Příkaz DRL (check_Force_condition()) lze použít také k externímu monitorování silových dat.
Pokud je režim paletizace nastaven na „ZAPNUTO“: K dispozici jsou stejné řídicí/monitorovací funkce poskytované ve stavu OFF, s výjimkou robotů řady H, P.
Vlastnosti | Řada a /E (na základě proudu) | Řada s (na základě proudu a FTS) | Řada M (na bázi JTS) | Řada H (na bázi JTS) | Řada P (na bázi JTS) |
|---|---|---|---|---|---|
Ovládání síly | O (nastavení je k dispozici pouze ve třech překladových směrech, bez otáčení) | O (na základě FTS) | O | O | O |
O (je-li režim paletizace nastaven na „ZAPNUTO“: Omezený výstup řízení síly (základní Rx, orientace Ry) 1)) | O (je-li režim paletizace nastaven na „ZAPNUTO“: Omezený výstup řízení síly (základní Rx, orientace Ry) 1)) | ||||
Kontrola dodržování předpisů | O (nastavení je k dispozici pouze ve třech překladových směrech, bez otáčení) | O (na základě FTS) | O | O | O |
O (je-li režim paletizace nastaven na „ZAPNUTO“: Omezený výstup kontroly shody (základní Rx, Ry orientace) 1)) | O (je-li režim paletizace nastaven na „ZAPNUTO“: Omezený výstup kontroly shody (základní Rx, Ry orientace) 1)) | ||||
Monitorování síly (Učení Přívěsek) | X | O (na základě FTS) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) |
O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) | O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) | ||||
Monitorování síly (Studio DART) | O (hodnota síly „0“ zobrazená pro singularitu) | O (na základě FTS) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) |
O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) | O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) | ||||
Monitorování síly (Při použití příkazů DRL: | O (hodnota síly „0“ zobrazená pro singularitu) | O (na základě FTS) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) | O (hodnota síly „0“ zobrazená pro singularitu) |
O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) | O (je-li režim paletizace nastaven na „ZAPNUTO“: 4 stupňů volnosti pro základnu (x , y , z , Rz)) |
Omezení výstupu ovládání (základní orientace Rx, Ry): Hodnoty kontroly síly nebo shody odpovídající hodnotám kontroly síly nebo shody odpovídající základní orientaci Rx, Ry nejsou výstupní. Zadání hodnoty síly nebo kontroly shody příslušné osy (Base Rx, Ry) bude ignorováno jako „0“.
Přehled singularity
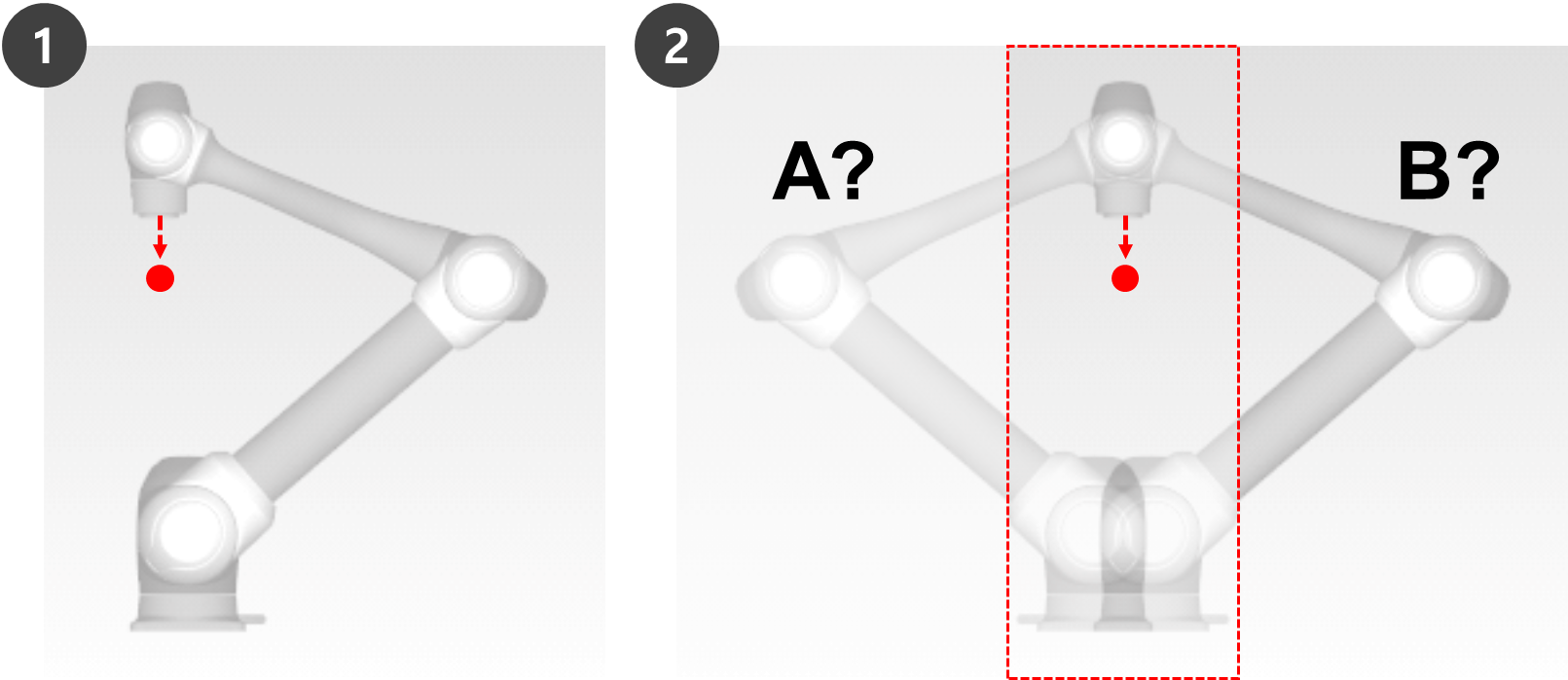
Singularita ve vícespojovém robotu se vztahuje na pozici (nebo bod ve vícespojovém robotu označuje pozici (nebo bod), kde má robot potíže s výpočtem své další pozice během pohybu. Vícekloubové roboty vypočítávají každý úhel kloubu během pohybu na základě konce robota
Například v Obr. 1 níže, když se robot pohybuje k červené tečce, robot nebude schopen určit, zda se jeho klouby posunou do pozice A nebo pozice B, jak je znázorněno na obrázku. 2. Tato pozice (nebo bod) se nazývá singularita.
V blízkosti singularity není pohyb robota tekutý z hlediska roviny, bodu a linie, lineární pohyb na konci robota nemusí být udržován a chyba polohy během řízení se může zvýšit. Singularita se vyskytuje v 3 případech, jak je znázorněno na následujícím obrázku, včetně případů, kdy klouby robota tvoří čáru.
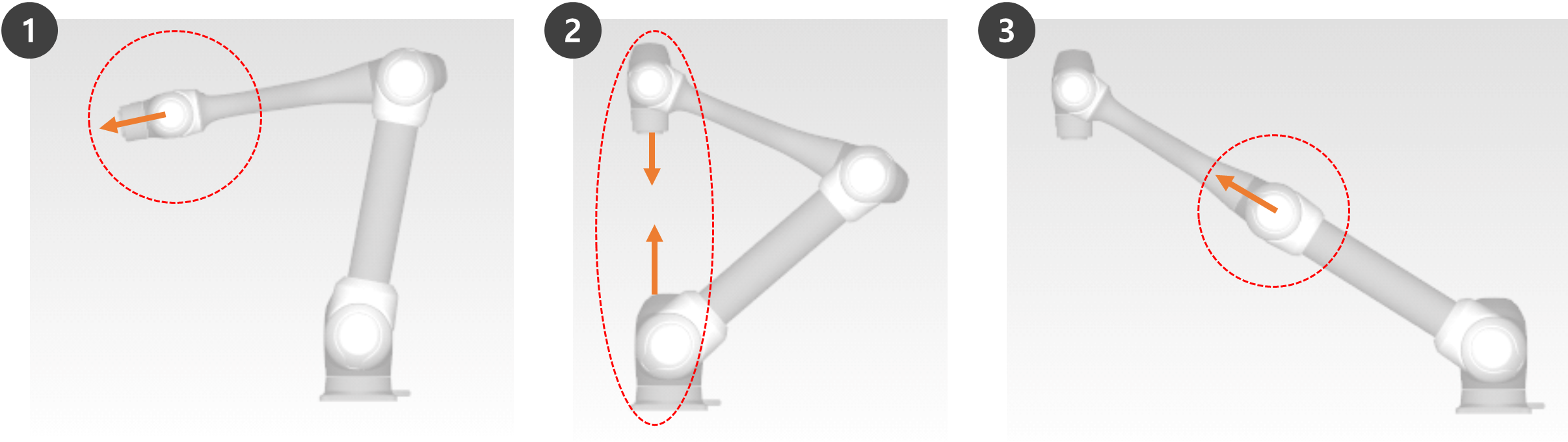
Singularita zápěstí: Když se zápěstí robota vytvoří, osa 5 se přiblíží k 0º
Ve srovnání s lidskou rukou odpovídají osy 4, 5 a 6 kloubu zápěstí.
Singularita ramen: Když jsou osy 1 a 6 na stejné čáře
Ve srovnání s lidskou paží odpovídají osy 1 a 2 ramennímu kloubu.
Singularita loktů: Když robot vytvoří čáru, když se osa 3 blíží 0º
Ve srovnání s lidským ramenem odpovídá osa 3 loketu.
Upozornění
Manuální a automatické operace pohybující se při otáčení spoje nejsou ovlivněny singularitou.
Pohyb úlohy, příkaz MoveL atd.
Singularita se vyskytuje pouze při ručním a automatickém provozu, kdy robot ukončí lineární pohyb.
Pohyb spoje, povely MoveJ atd.
V zóně singularity není k dispozici kontrola síly nebo kontrola shody.
Vzhledem k tomu, že rychlost otáčení určitých os se rychle zvyšuje, když lineární pohyb prochází singularitou, je možné, že dojde k porušení limitu rychlosti spoje nebo porušení limitu úhlu kloubu.
Jak se vyhnout singularitě
Roboty Doosan Robotics poskytují možnosti, jak se vyhnout singularitám během řízení pohybu. Doporučuje se však nakonfigurovat úkol, který nevytváří výjimky pomocí příkazů společného pohybu, jako je například MoveJ v singularitních zónách.
Zde jsou možnosti vyhýbání se singularitě poskytované společností Doosan Robot:
Automatické vyhýbání: Provádí pohyb tím, že se vyhýbá singularitám. Pohyb robota se však může lišit od očekávané cesty.
Priorita cesty: Udržuje cestu a rychlost, ale může se zastavit kvůli chybě v blízkosti singularity.
Variabilní rychlost: Udržuje cestu, ale zpomaluje se v blízkosti singularity.
Přehled Eulerova úhlu
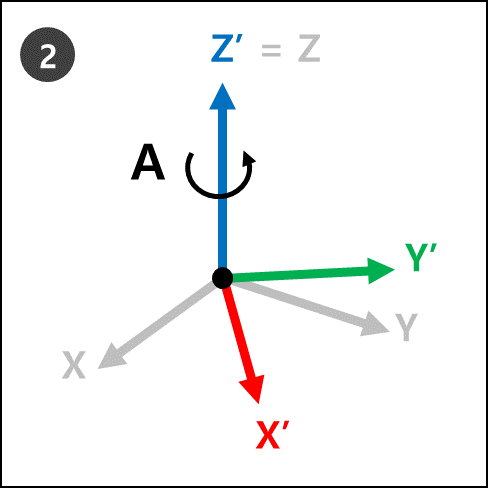
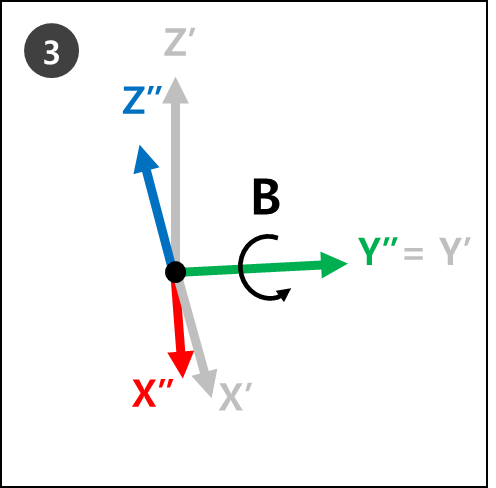
Eulerův úhel je způsob, jak vyjádřit úhly os X, Y a z , které jsou mezi sebou kolmé ve směru objektu. A, B a C odkazují na úhly sekvenčního otáčení. Každý výrobce robotů definuje toto pořadí rotace A, B a C jinak, například Rz-Ry-Rz, Rz-Ry-Rx nebo Rx-Ry-Rz.
Například Rz-Ry-Rx. Zde Rz znamená rotaci v ose z , Ry znamená rotaci v ose Y a Rx znamená rotaci v ose X. RZ lze vyjádřit jako úhel A, Ry jako úhel B a Rx jako úhel C pro označení aktuálního směru otáčení objektu. Všimněte si, že jakmile se rotace provede ve směru osy z od souřadnic, rotace bude provedena na základě nových souřadnic.
To lze vizualizovat kroky 1 až 4.
 |
 |
 |
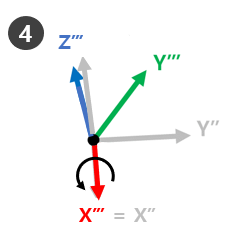 |
Nové souřadnice (z ’’’’’’’, Y’’’’’’, X’’’’’, krok 4, se vztahují k aktuální rotaci robota, když jsou použity Euler úhly A, B a C.
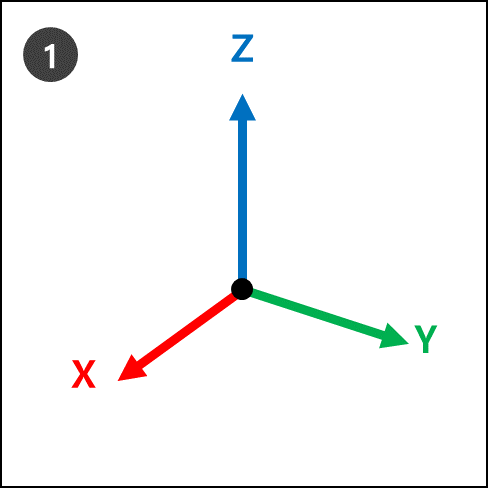
To lze snadno vizualizovat pravou rukou. Udělejte následující pózu pravou rukou. Toto se nazývá pravidlo pravé ruky a tím, že palec (osa X), ukazováček (osa Y) a prostřední prst (osa z ) budou kolmé k sobě, vytvoří souřadnice skládající se z os X, Y a Z.
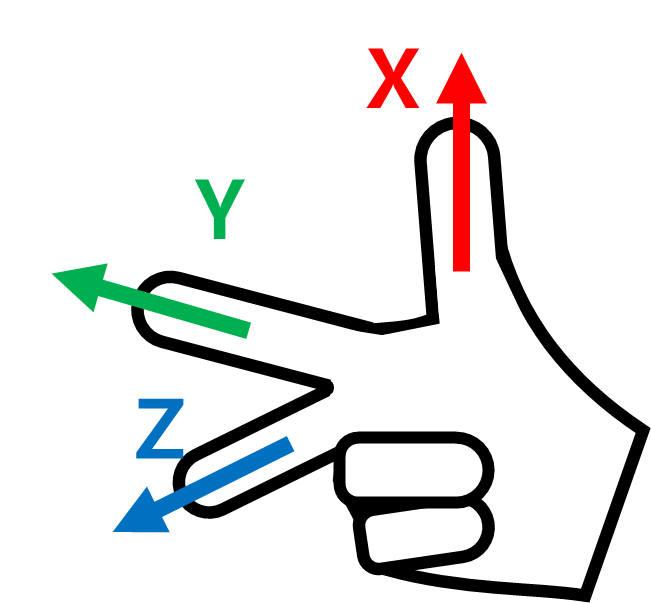
Pak udělejte pravou kartézskou pozici Rule a proveďte rotaci Rz, Ry a Rx v sekvenčním pořadí.
RZ: Otočte prostředním prstem (osa z ) o stupně.
RY: Otočte ukazováčkem (osa Y) o stupně B.
RX: Otočte palcem (osa X) o stupně C.
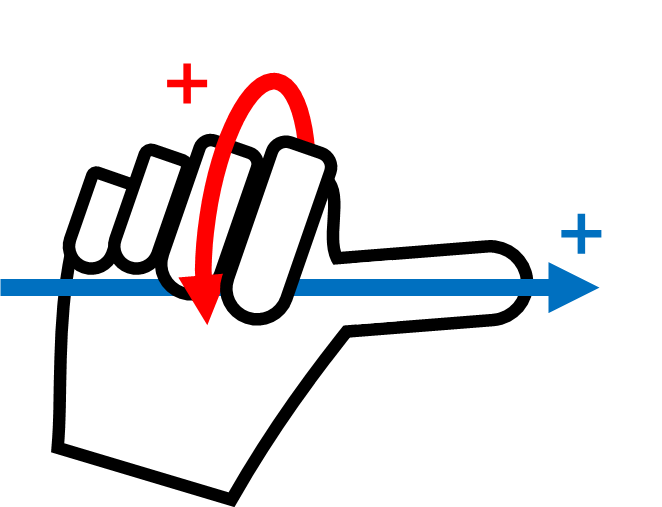
Poznámka
Směr + otáčení + směru otáčení A, B a C je směr čtyř prstů kromě palce, když palec směřuje na směr + a čtyři prsty jsou sevřené. Tomu se říká zákon o pravotočivé šroubové svorce.