
Funkce zásahu obsluhy
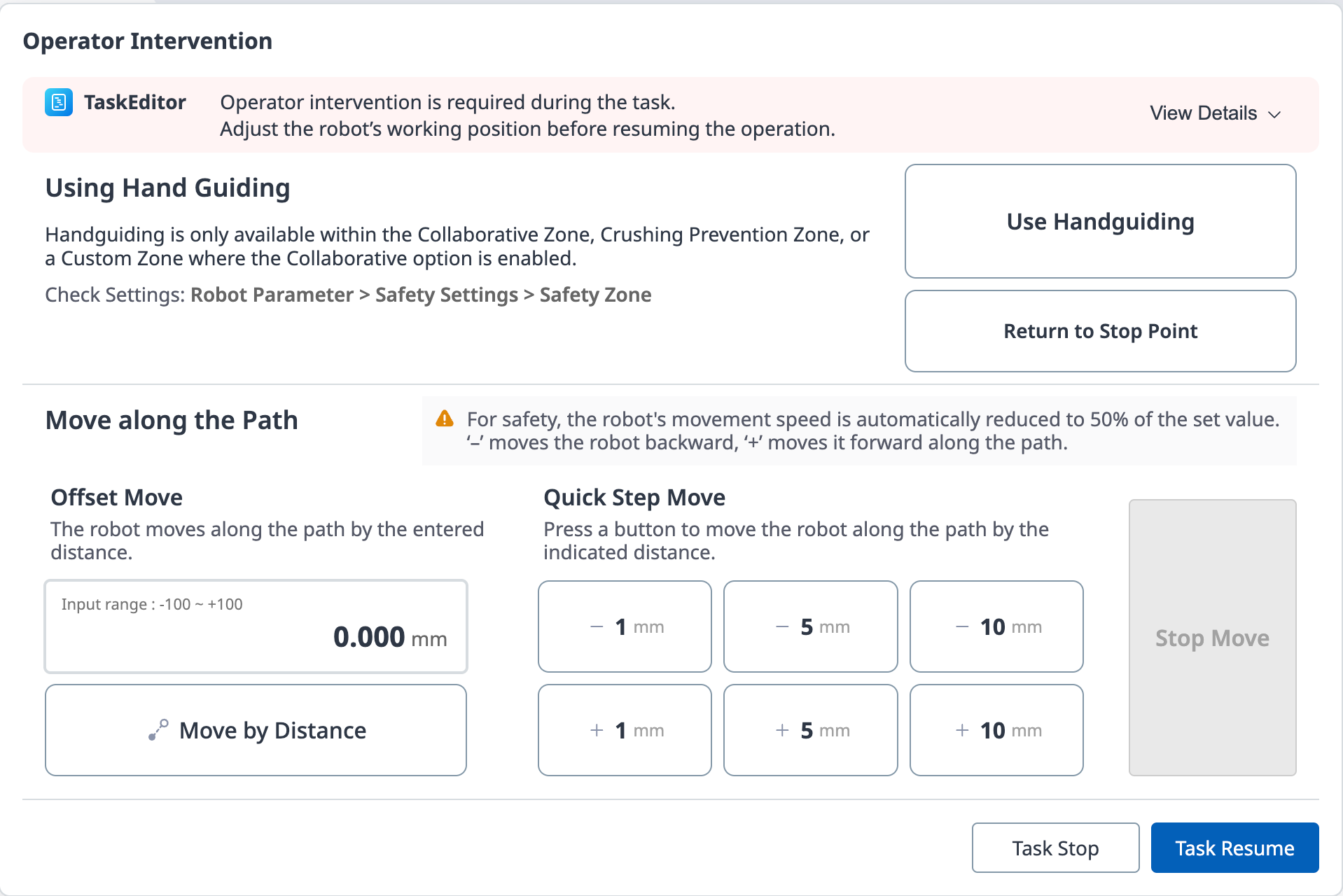
Pokud se během provozu robota vyskytne problém nebo uživatel vydá příkaz, robot přestane pracovat a zobrazí překryvnou zprávu, která obsluze umožní zasáhnout a vyřešit situaci. Poté, co uživatel problém vyřeší, úkol pokračuje na řádku programu, kde k problému došlo.
Poznámka
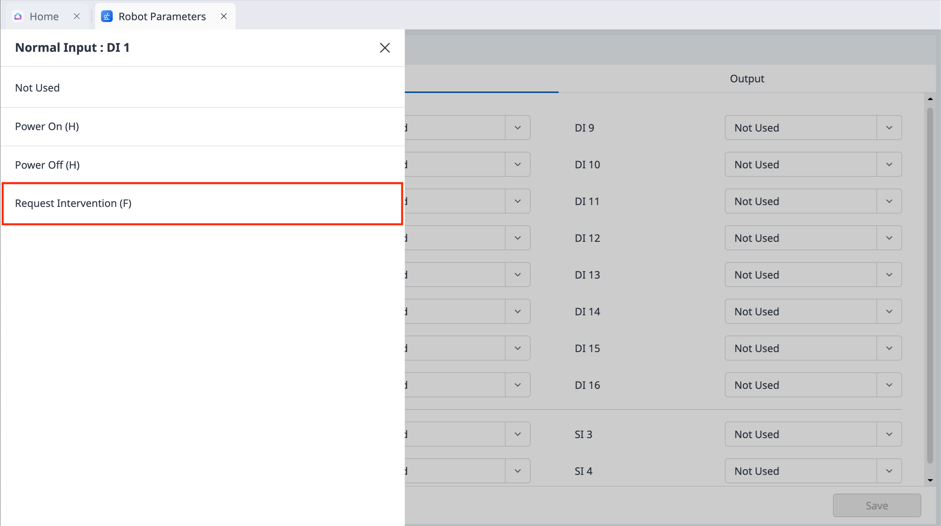
Chcete-li použít funkci zásahu pracovníka, musíte dokončit jedno z níže uvedených nastavení.
Modul parametrů robota - normální i /o - vstup - požadavek na zásah (F)
Klasický svařovací modul - nastavení analogového svařování - nastavení komunikace - vstup
(pokud je povolen některý z následujících signálů [Arc Active/Gas Off/Wire Stick/Machine Error].)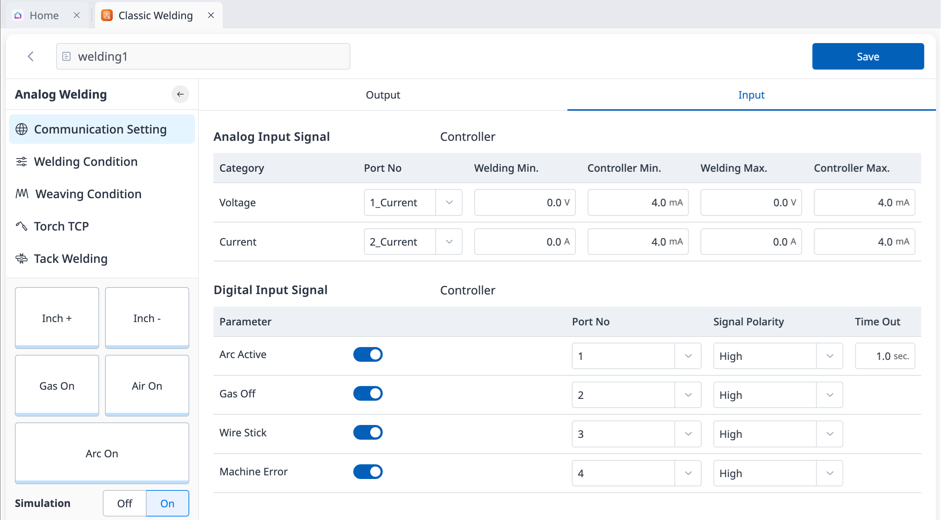
Stejným způsobem proveďte „pohyb po tlačítku cesty“ a „krokový pohyb (-10,-5,-1,+1,+5,+10)“. První se však pohybuje dopředu nebo dozadu z referenční polohy ručně zadaným odsazením, zatímco druhý se zaměřuje na bod dopředu nebo dozadu přednastaveným odsazením kroku. Po dokončení akce pomocí výše uvedených tlačítek se stisknutím dalšího tlačítka přesune aktuální pozice o posun.
Tlačítko „použít navádění“ se aktivuje pouze při nastavení zóny spolupráce a stav robota se změní na stav navádění, což umožňuje přímé učení v zóně. Poté můžete aktivovat přímé učení stisknutím tlačítka na zadní straně kokpitu nebo výukového přívěsku.
V režimu navádění se tlačítko „použít navádění“ změní na „tlačítko ukončit navádění“.
Když stisknete tlačítko „ukončit navádění“, stav navádění končí. V této době jsou z bezpečnostních důvodů porovnány aktuální pozice robota, úhel a hodnoty bodu zastavení (čas, kdy dojde k prvnímu vyskakování), aby se vygenerovaly vyskakovací okno. Pokud se objeví překryvné okno s následujícím obsahem, musíte se znovu naučit přímo opravit pozici a pozici robota a zkusit to znovu.
Pokud se přímá vzdálenost mezi aktuální pozicí TCP a TCP v pozici STOP liší o více než 20 cm
Pokud se rozdíl mezi aktuálním úhlem spoje a úhlem kloubu v bodě zastavení liší o více než 1 ~ 3 osy (10 stupňů) / 4 ~ 5 os (30 stupňů) / 6 os (60 stupňů)
Tato funkce je podporována pouze při operacích MoveL / MoveC / MoveB.
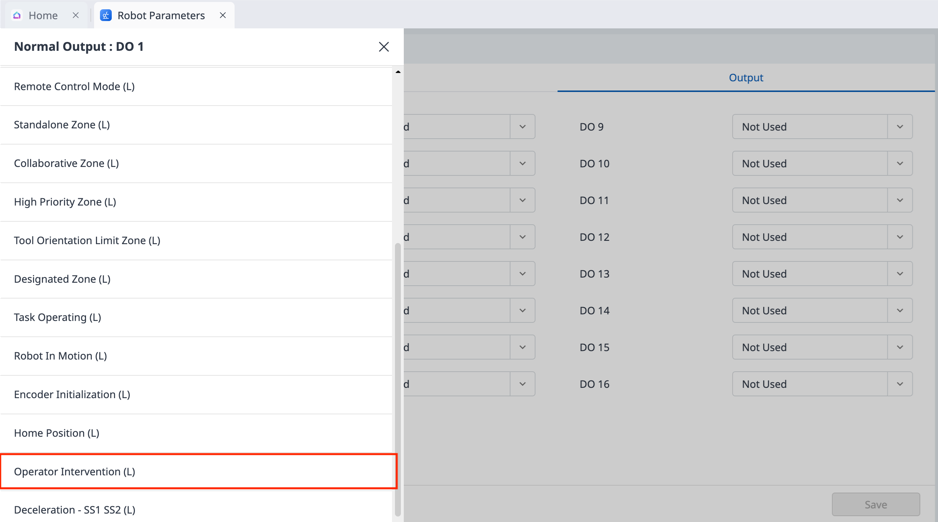
Funkci normální výstup můžete použít k signalizaci, že došlo k vyskakování. Signál zůstane aktivní, když se objeví vyskakovací okno, a po ukončení vyskakovacího okna bude deaktivován.
Modul parametrů robota – normální i /o – výstup – zásah obsluhy (L)
Zde je scénář použití:
Přijímejte digitální vstupní signál od uživatele nebo připojeného zařízení, když je program spuštěn.
Robot se zastaví a zobrazí se překryvné okno zásahu obsluhy.
(Pokud používáte přímou výuku) stiskněte tlačítko použít navádění, pak stiskněte tlačítko na zadní straně kokpitu nebo výukový přívěsek pro aktivaci přímé výuky. Po dokončení operace přímého učení stiskněte tlačítko ukončit navádění.
Stisknutím tlačítka přesunout podél cesty přesuňte robota po cestě.
Po přesunutí robota podle potřeby stiskněte tlačítko pokračovat, čímž obnovíte úlohu robota a zavřete překryvné okno.