
Vyzkoušejte vzorky příkazu compliance
Upozornění
Před zkoušením vzorku se ujistěte, že jste si přečetli a dodržujete bezpečnostní opatření. Další informace naleznete v ČÁSTI 1. Bezpečnostní příručka.
Poznámka
Pokud je při povolení nebo zakázání kontroly konformity překročena vnější hodnota točivého momentu, robot program zastaví kvůli chybě JTS (Joint Torque Sensor).
Změnu tuhosti lze provést bez ohledu na velikost vnějšího momentu.
Během kontroly dodržování předpisů nelze provádět společné pohyby, například příkaz MoveJ.
Prahová hodnota chyby JTS (Nm) | ||||||
Model | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
M1013 | 25 | 25 | 25 | 15 | 15 | 15 |
M0617 | 30 | 30 | 30 | 15 | 15 | 15 |
M0609 | 18 | 18 | 15 | 15 | 15 | 15 |
M1509 | 18 | 18 | 15 | 15 | 15 | 15 |
H2515 | 40 | 50 | 40 | 15 | 15 | 15 |
H2017 | 40 | 50 | 40 | 15 | 15 | 15 |
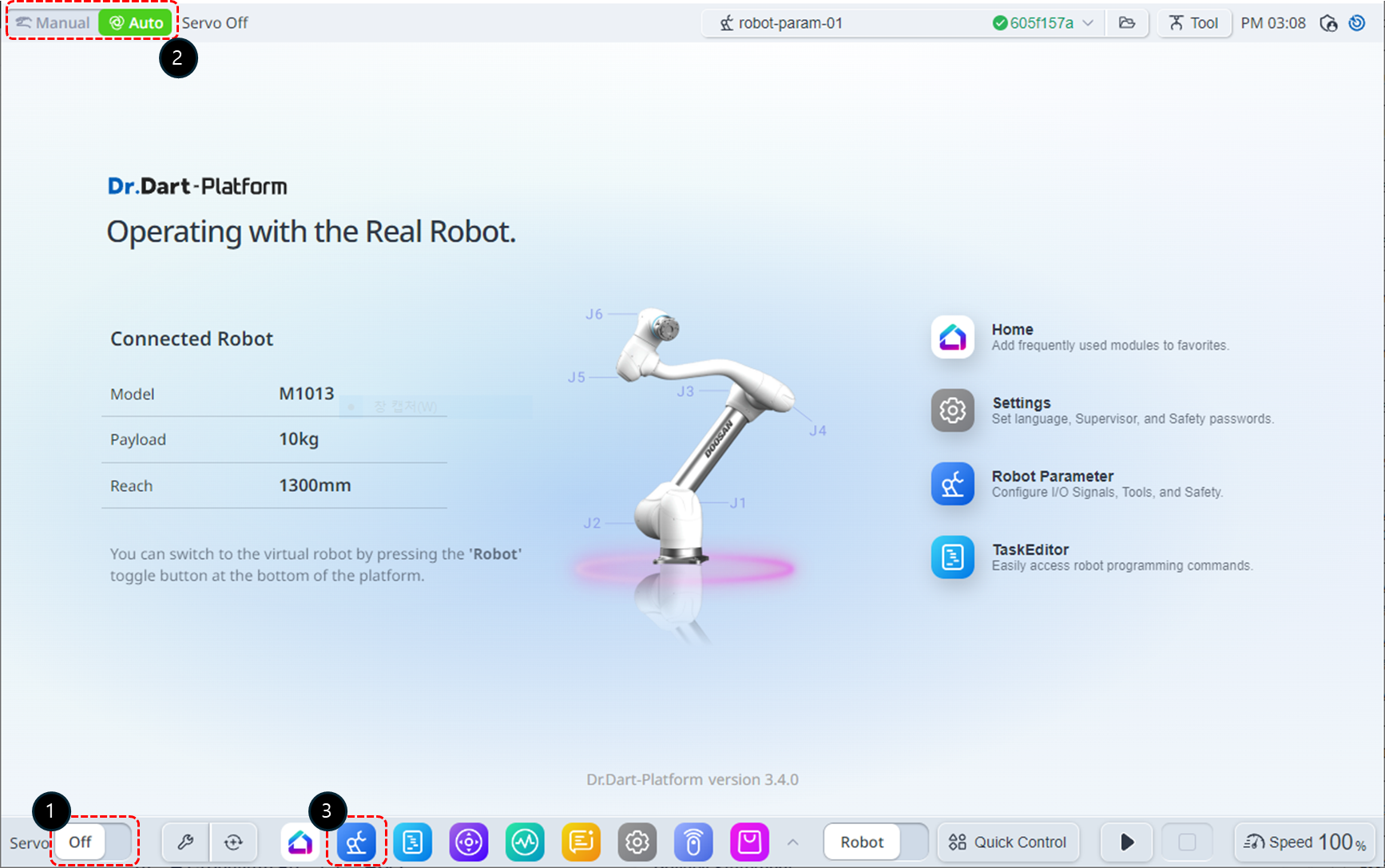
Změňte stav servomechanismu na Zapnuto.
Změňte provozní režim na Ruční.
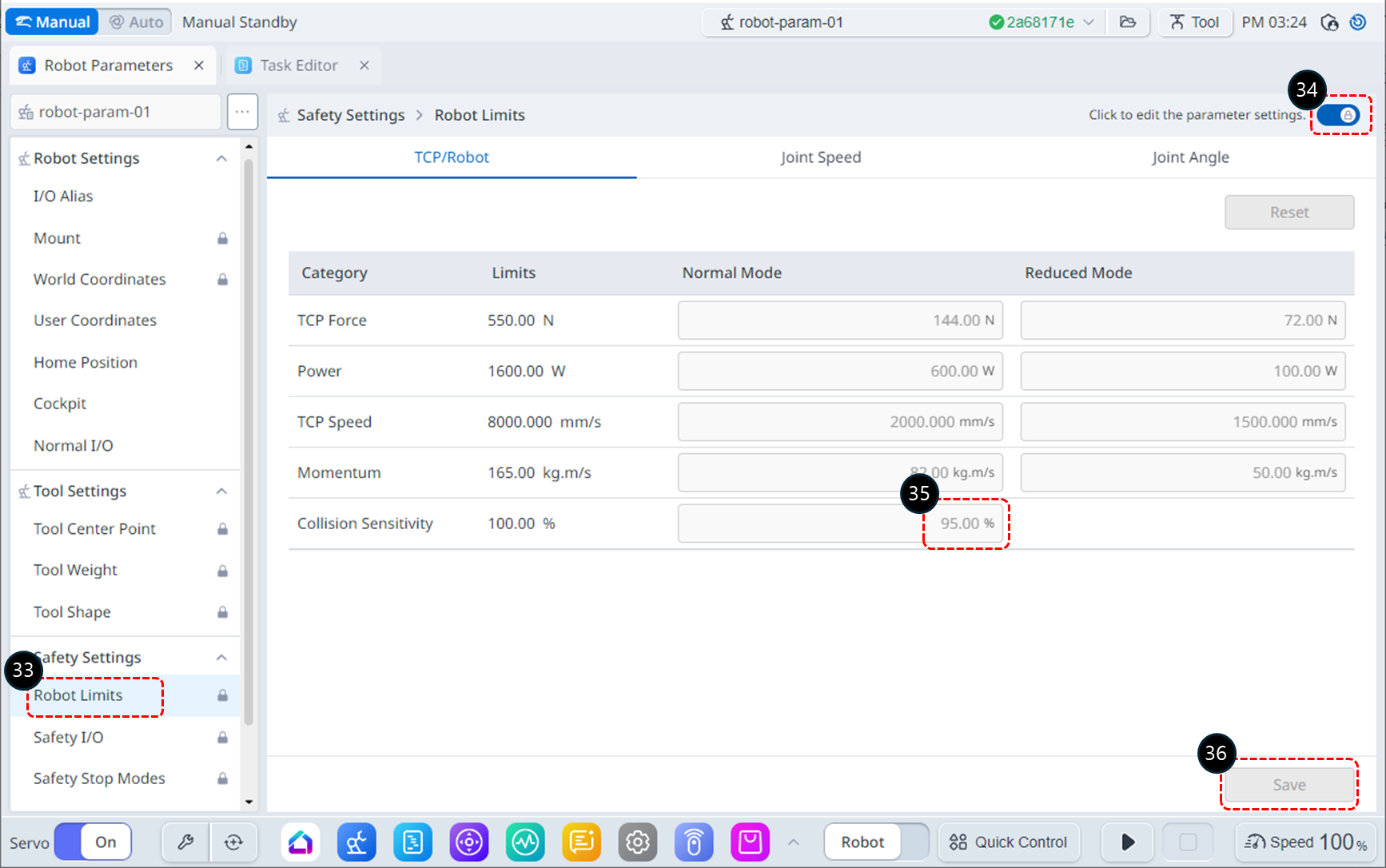
V dolní nabídce vyberte modul parametrů robota. V tomto příkladu je citlivost kolize nastavena na 95 %, aby se vysvětlil důvod snížení citlivosti kolize při použití kontroly dodržování předpisů.
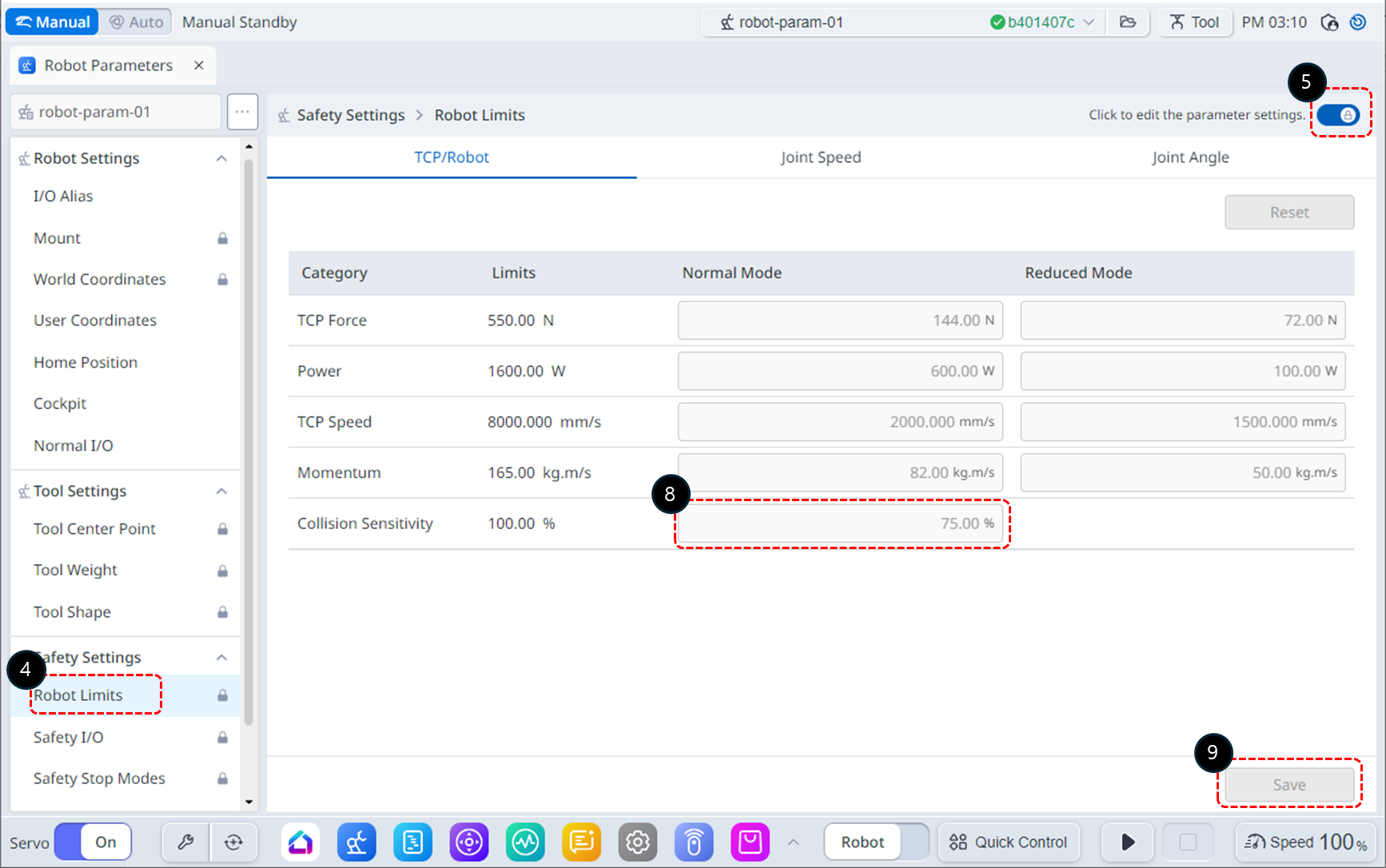
V Nastavení bezpečnosti vyberte limity robota.
Povolte stav úpravy parametrů.
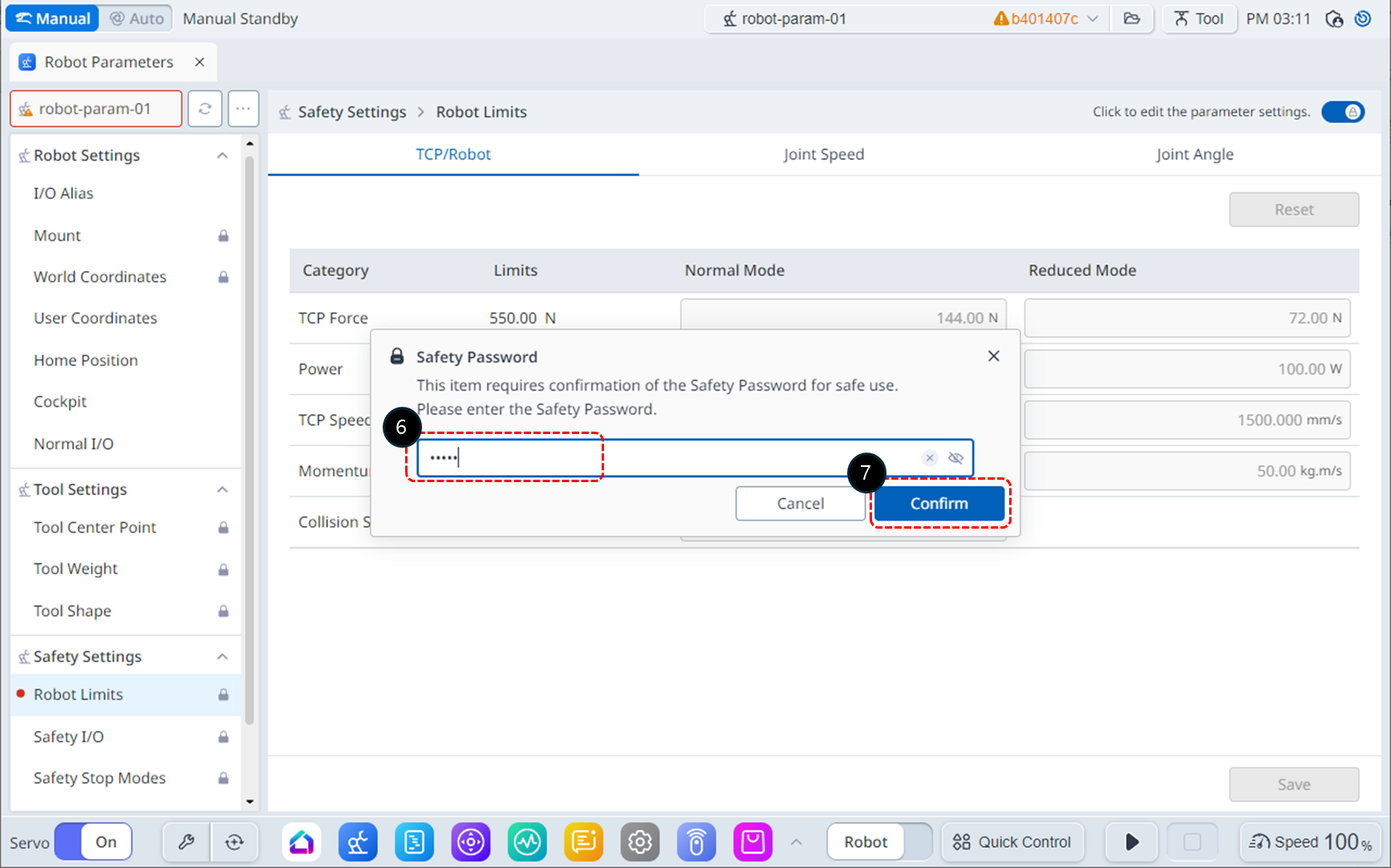
Pokud se zobrazí okno pro zadání hesla, zadejte bezpečnostní heslo (výchozí bezpečnostní heslo: Admin).
Klikněte na tlačítko potvrdit.
Upravte citlivost kolize na 95 %.
Klepnutím na tlačítko Uložit uložte nastavení.
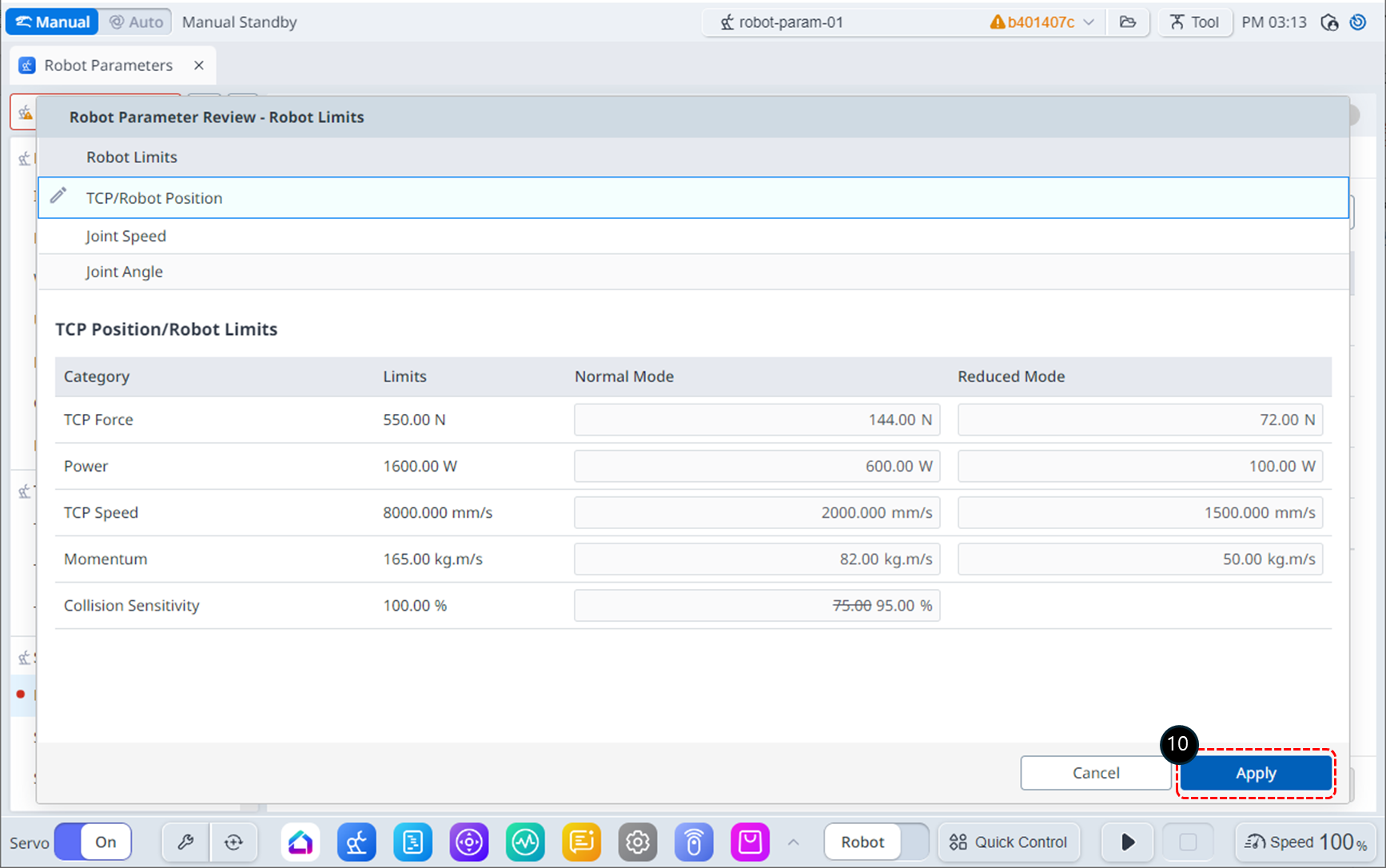
Po kontrole změn klikněte na tlačítko použít.
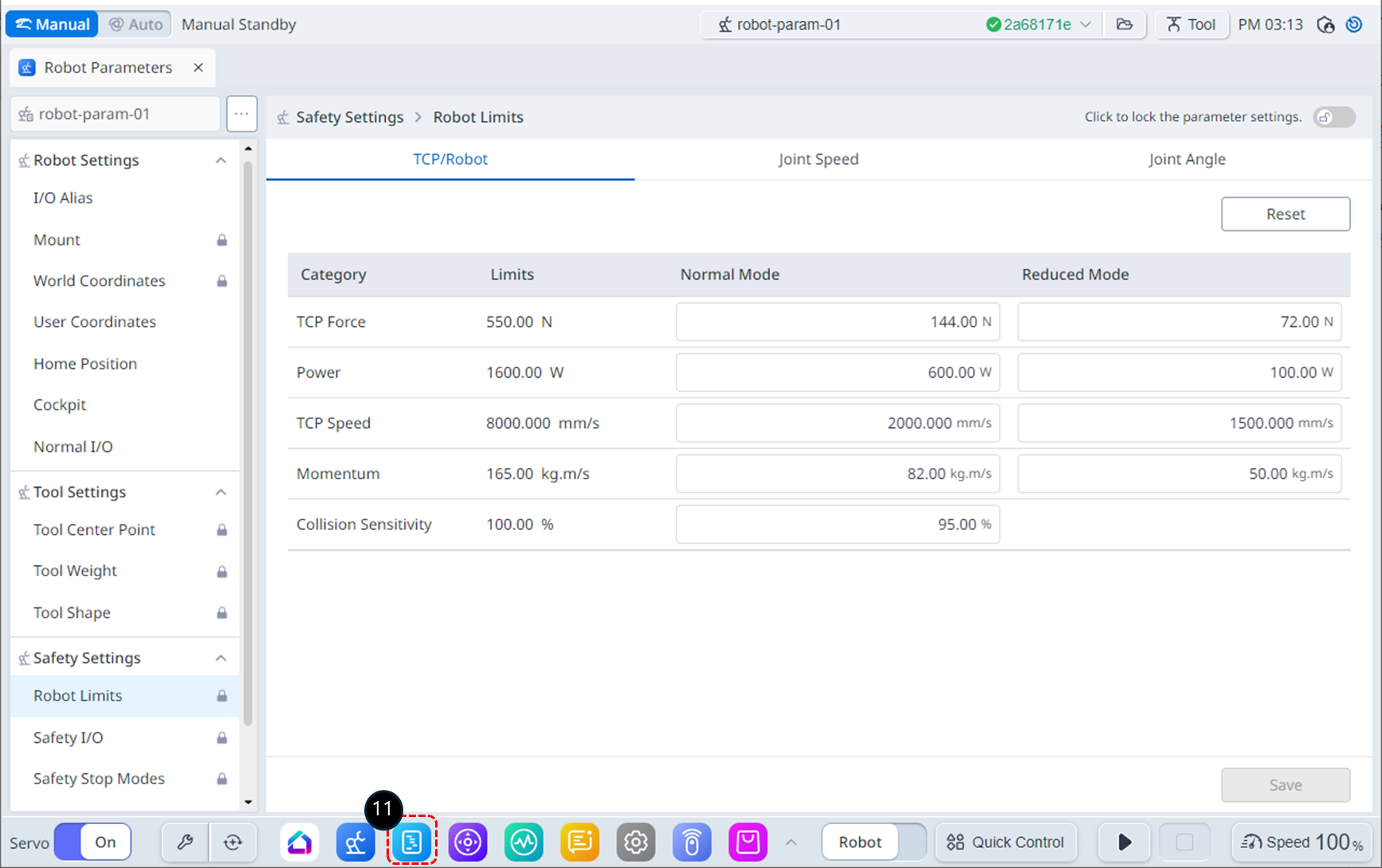
V dolní nabídce vyberte modul Editor úloh.
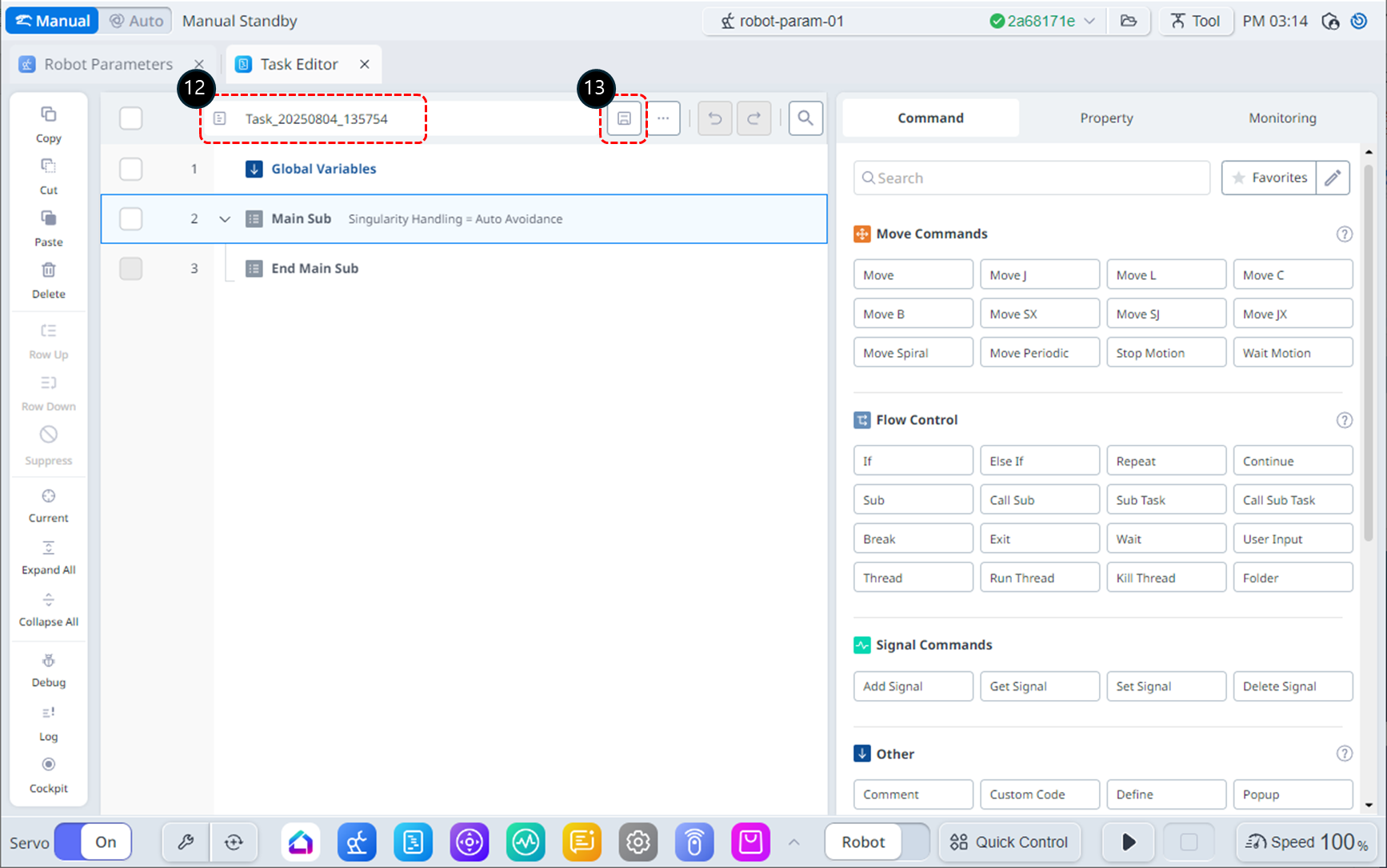
Přejmenujte úlohu na Task_demo_Compliance_ctrl.
Uložte aktualizovaný název úkolu.
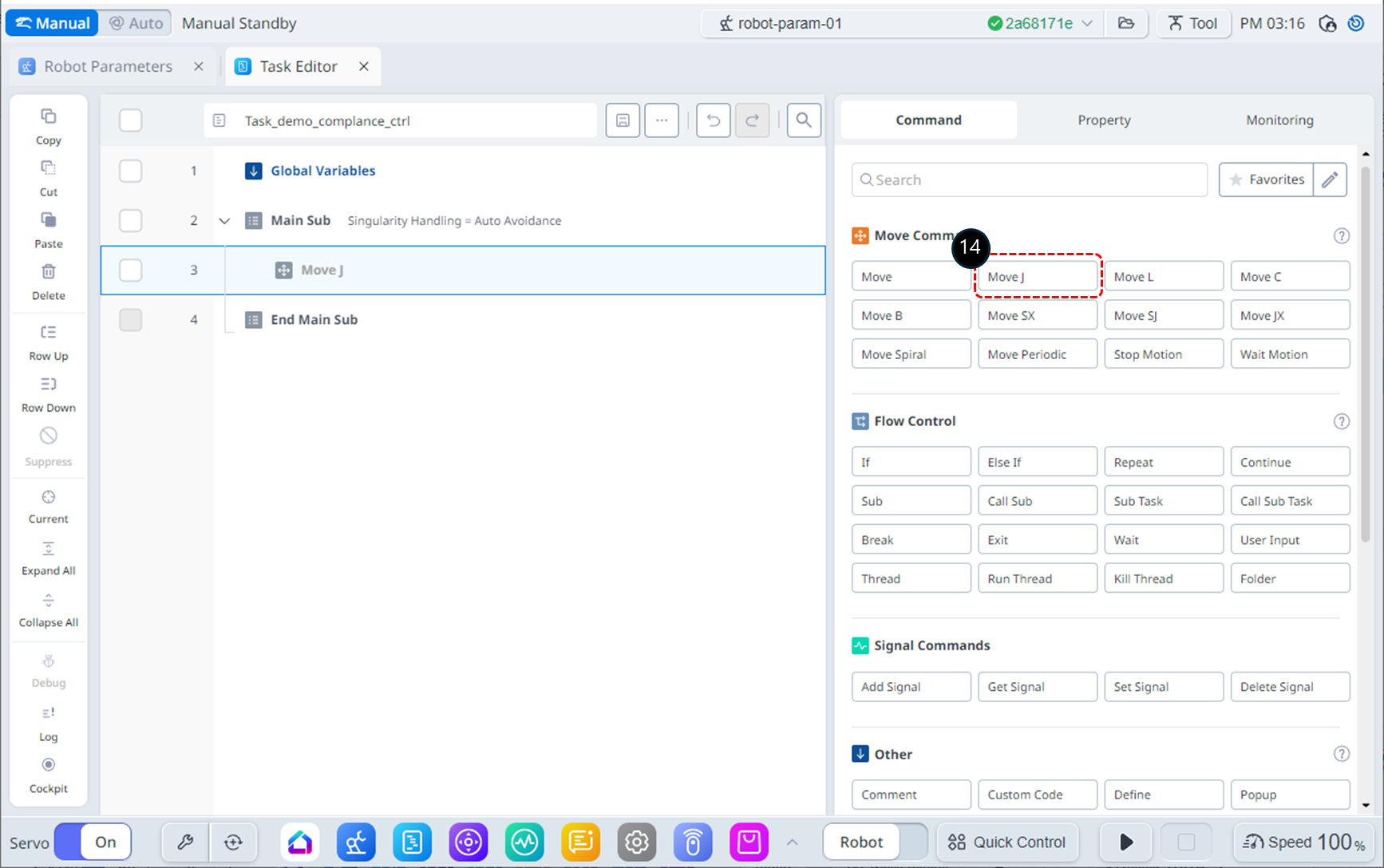
Přidejte příkaz MoveJ. Tento povel slouží k přesunutí robota do výchozí polohy pro kontrolu dodržování předpisů.
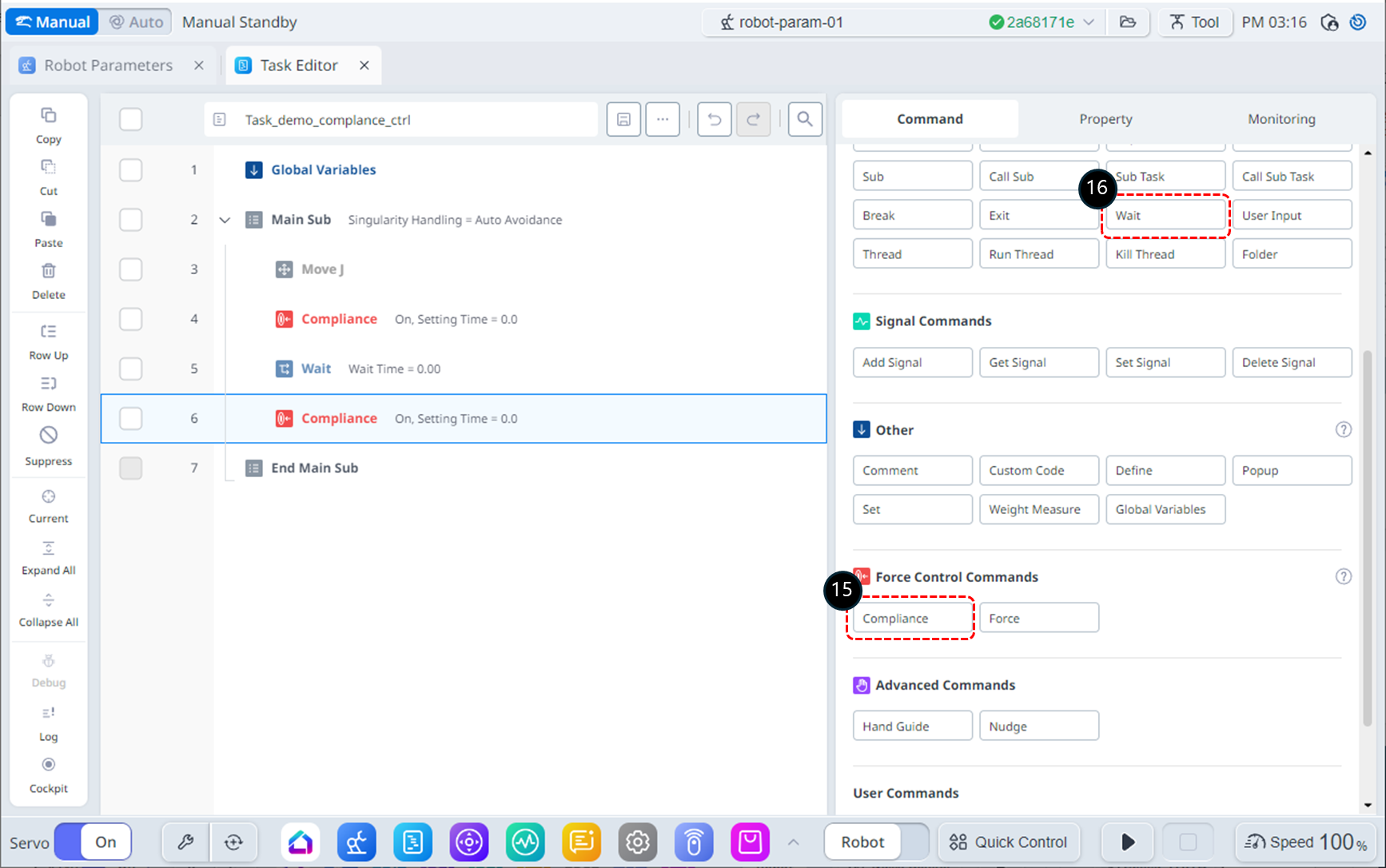
Přidejte dva příkazy compliance. Tyto příkazy budou použity k aktivaci a deaktivaci kontroly dodržování předpisů.
Mezi příkazy compliance vložte příkaz čekací. Tento povel čekání bude použit k udržení kontroly dodržování předpisů.
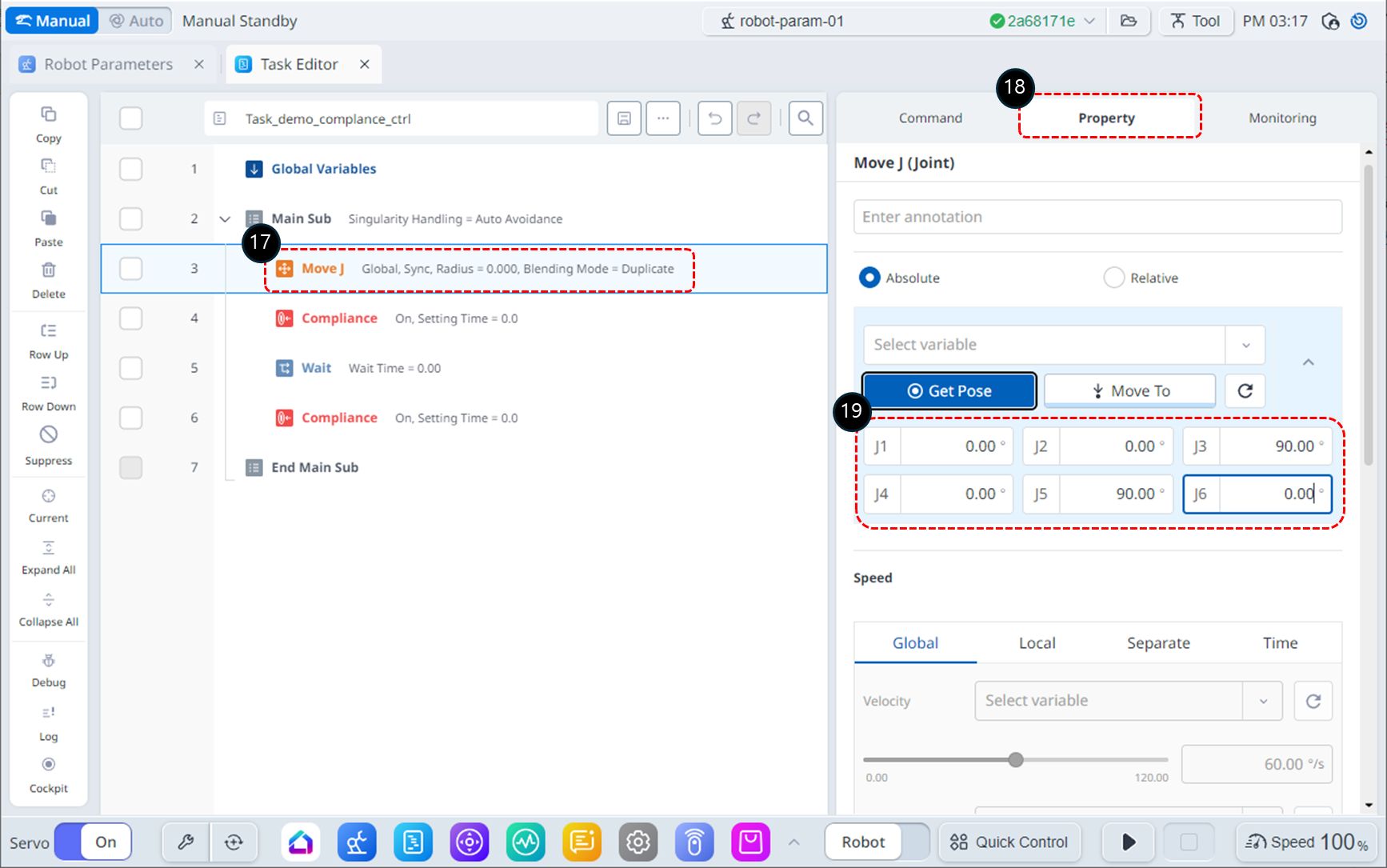
Vyberte příkaz MoveJ na řádku 3.
Vyberte kartu Vlastnosti.
Změnit cílovou polohu MoveJ na (0, 0, 90, 0, 90, 0) odd. V závislosti na montážním prostoru robota lze v případě potřeby nastavit úhel J1.
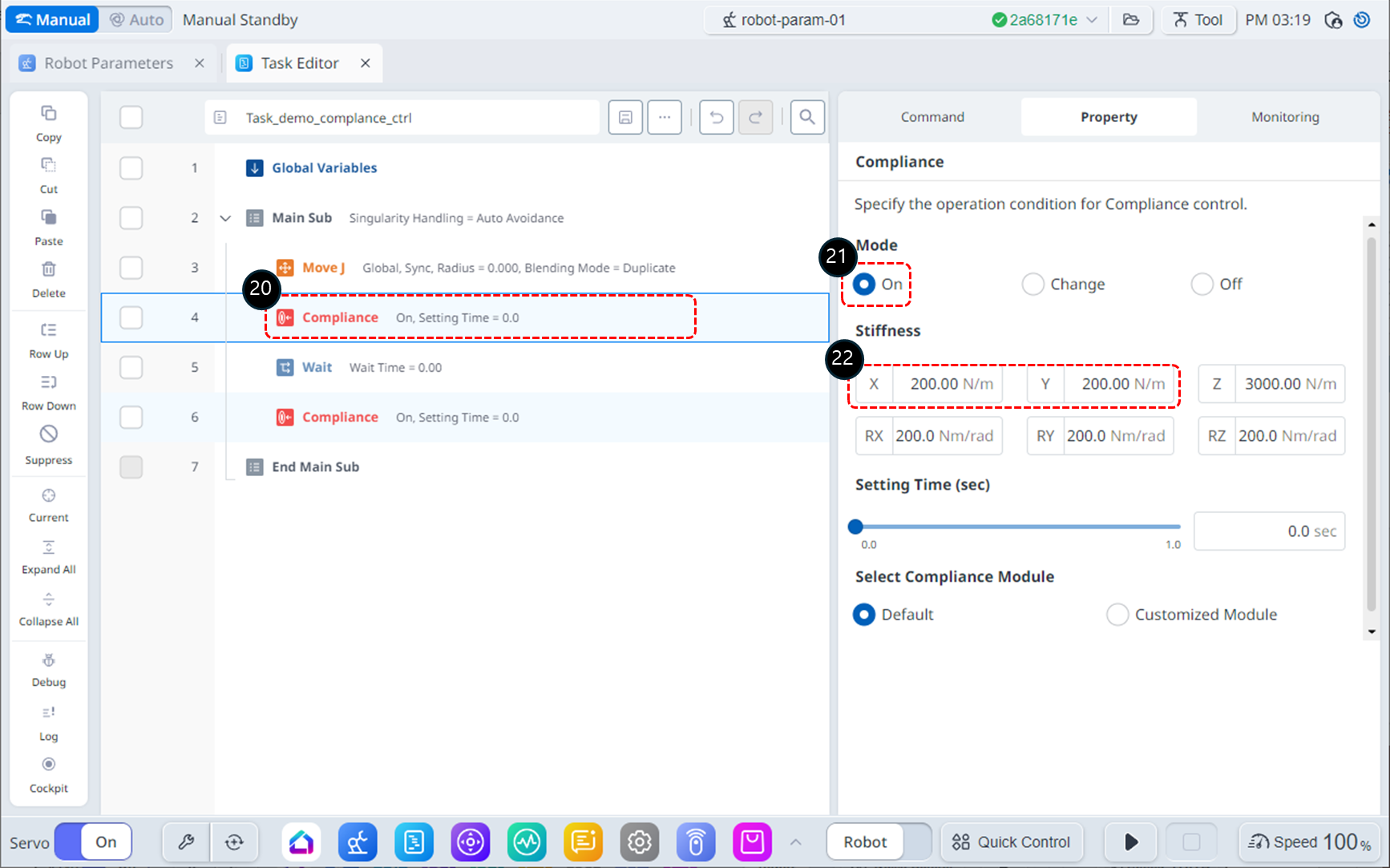
Vyberte příkaz compliance na řádku 4.
Na kartě Vlastnosti nastavte režim takto: Režim ZAPNUTO aktivuje kontrolu dodržování předpisů.
Režim: Zapnuto
Nastavte tuhost takto: Snižte tuhost ve směrech X a Y, aby robot reagoval jemněji v těchto směrech.
X: 200 N/m.
Y: 200 N/m.
Z: 3000 N/m (výchozí)
RX, Ry, Rz: 200 Nm/rad (výchozí)
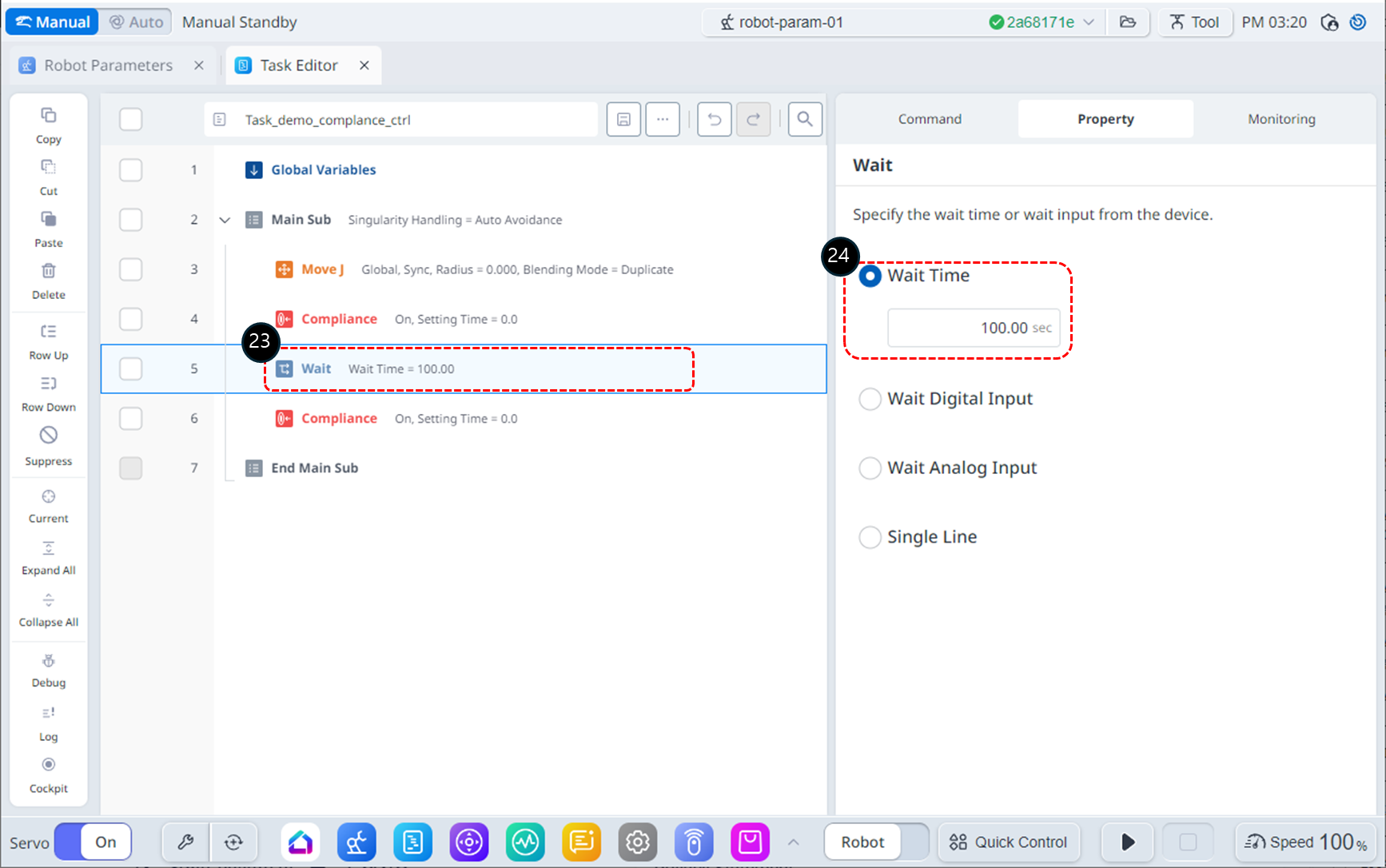
Vyberte příkaz čekání na řádku 5.
Nastavte čekací dobu následujícím způsobem.
Čekací doba: 100 s
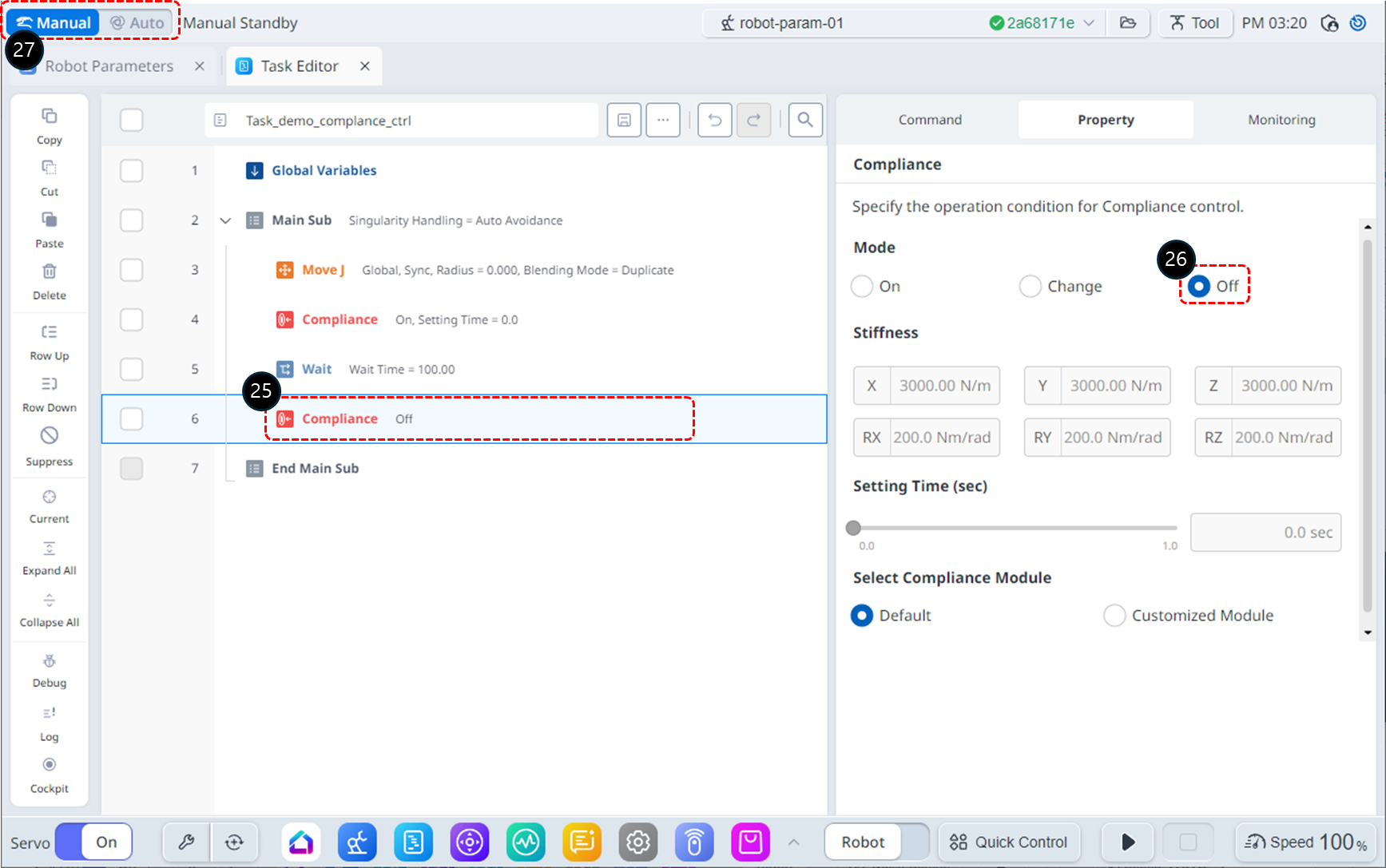
Vyberte příkaz compliance na řádku 6.
Na kartě Vlastnosti nastavte režim takto: Režim Vypnuto deaktivuje kontrolu dodržování předpisů.
Režim: Vypnuto
Změňte provozní režim na Auto. Karta Vlastnosti se automaticky přepne na kartu monitorování.
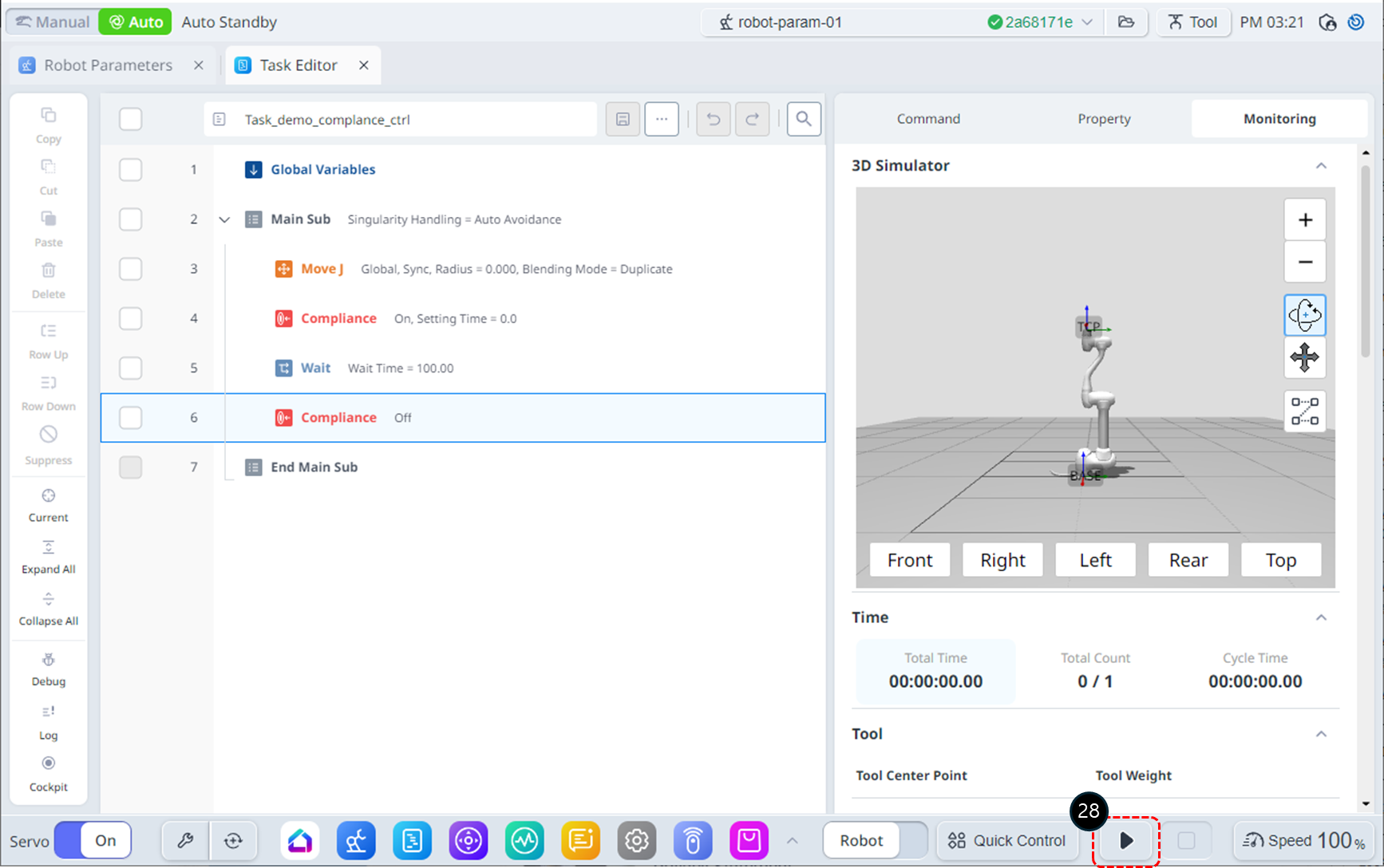
Klepněte na tlačítko Spustit. Robot se přesune do výchozí polohy, zahájí kontrolu dodržování předpisů a zůstane v klidu po dobu 100 sekund. Během této doby jemně zatlačte koncový efektor robota směrem k tělu robota. Robot se zastaví s chybou kolize (nebo chybou limitu síly TCP). Ve stavu bezpečnostního zastavení způsobeném kolizí zobrazí LED dioda robota žlutou barvu.
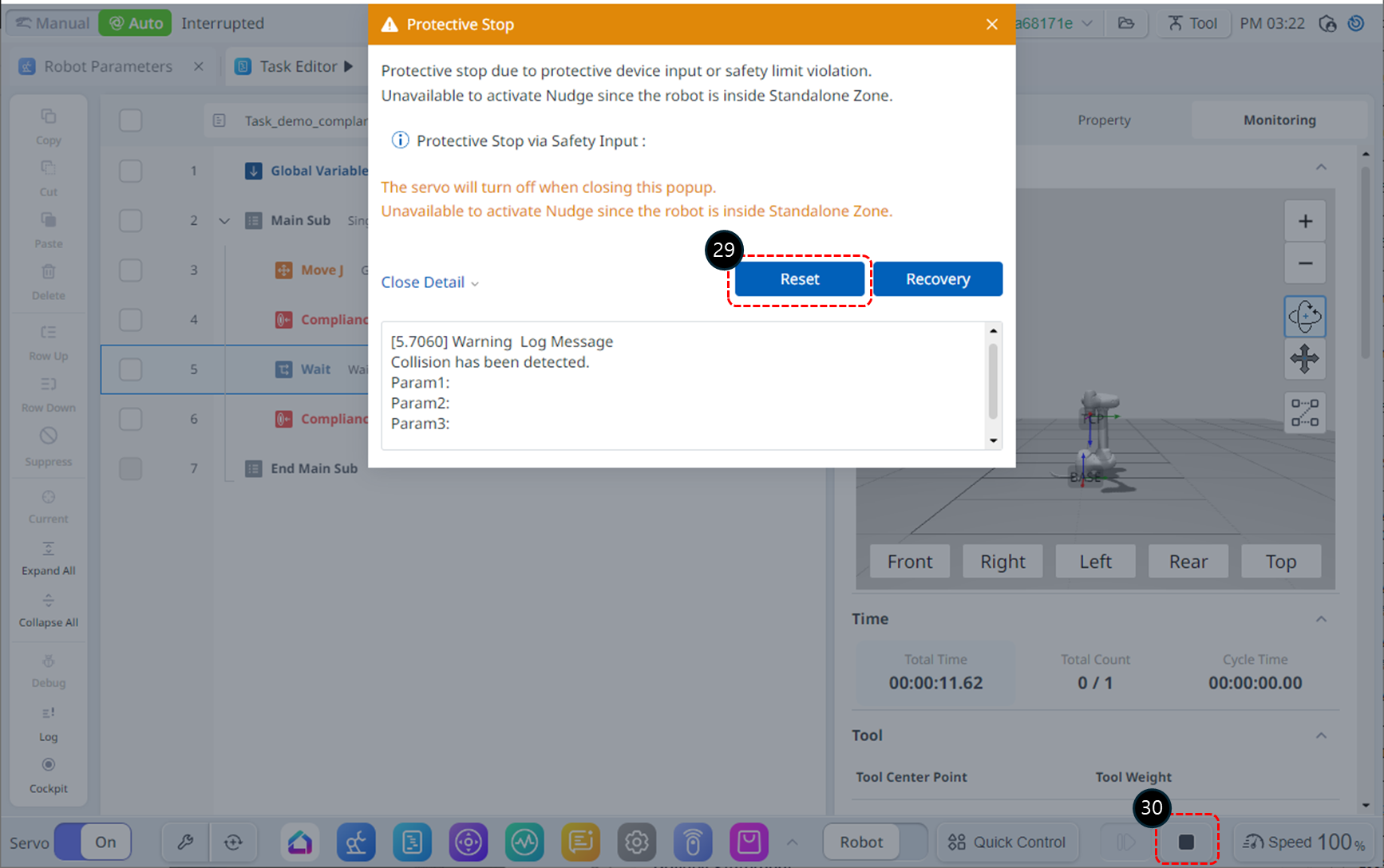
Klepněte na tlačítko Obnovit v okně varování před bezpečnostním zastavením. Operační program bude pokračovat v provozu.
Klepnutím na tlačítko Stop program ukončíte.
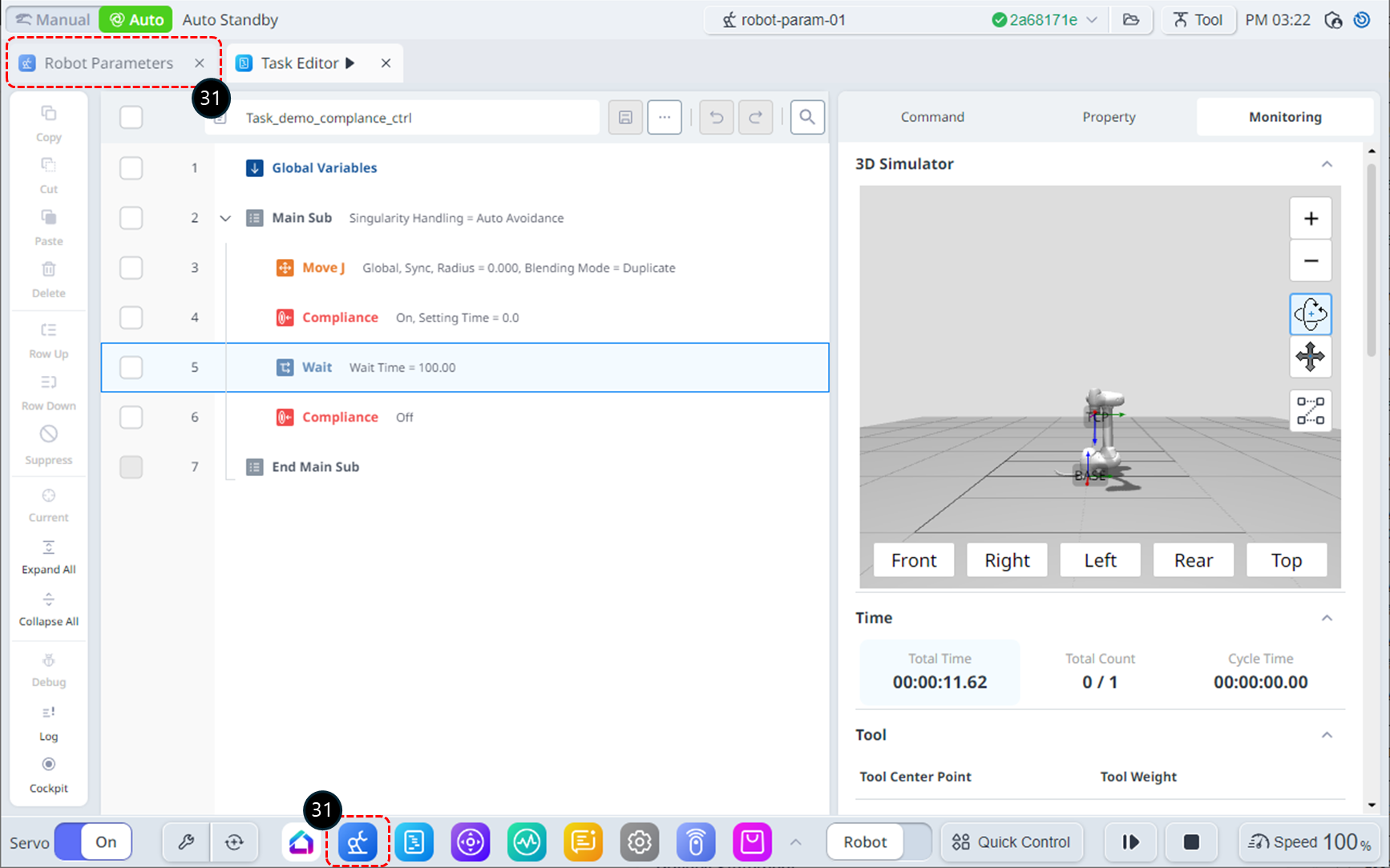
Pro řešení kolizních problémů je třeba snížit citlivost kolize v bezpečnostních nastaveních. (Pokud je problém s limitem síly TCP, parametr síly TCP by měl být zvýšen.) V dolní nabídce vyberte modul parametrů robota. Případně můžete vybrat kartu Modul parametrů robota v levém horním rohu, který funguje stejně.
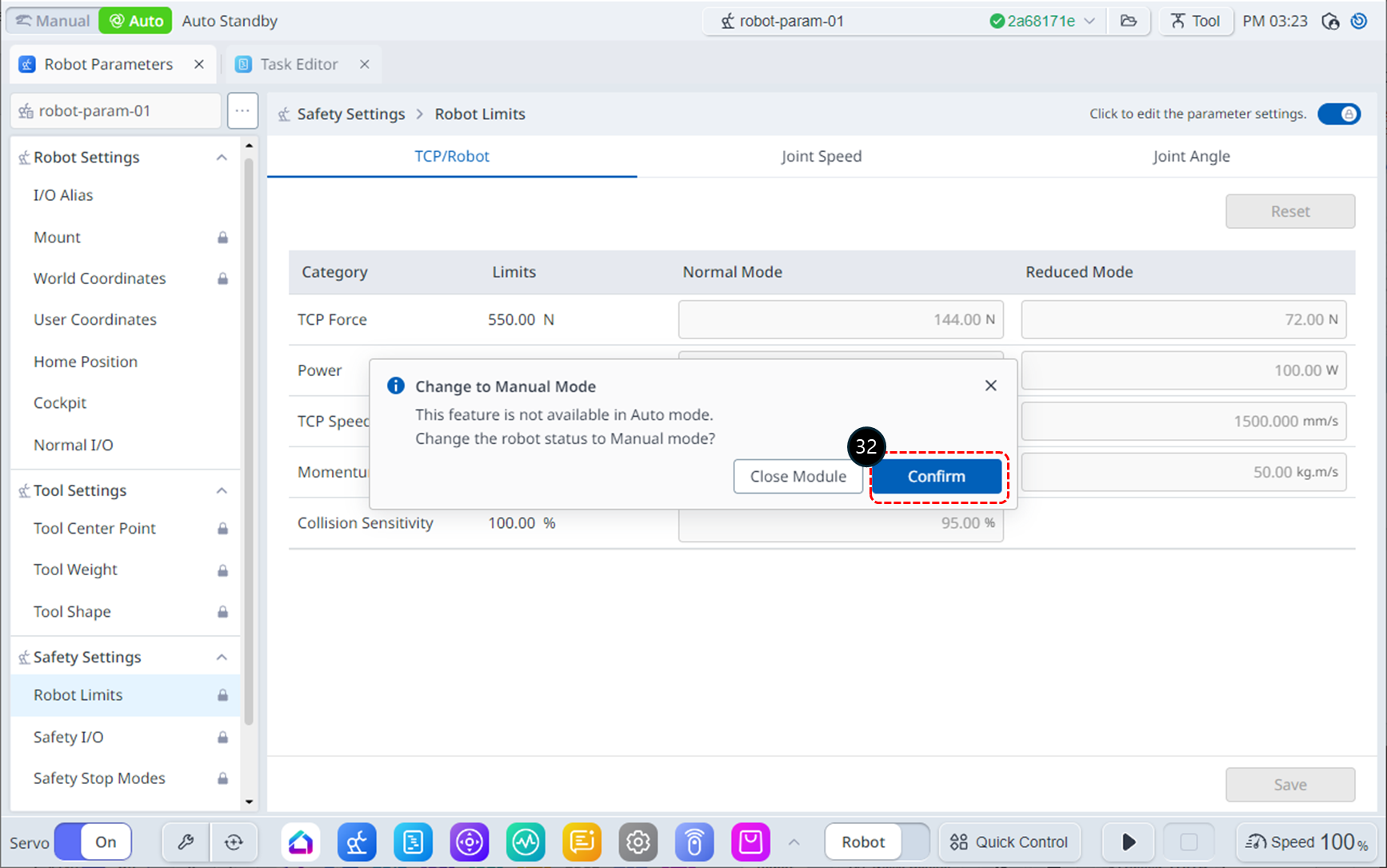
V automatickém režimu spustí přístup k modulu parametry robota okno s upozorněním. Klepnutím na tlačítko potvrdit přepnete do ručního režimu.
V Nastavení bezpečnosti vyberte limity robota.
Povolte stav úpravy parametrů. Pokud se zobrazí okno pro zadání hesla, přejděte na kroky 6–7.
Upravte citlivost kolize na 50 %.
Klepnutím na tlačítko Uložit uložte nastavení. Pokud se zobrazí okno Kontrola parametrů robota, zkontrolujte úpravy a klepněte na tlačítko použít.
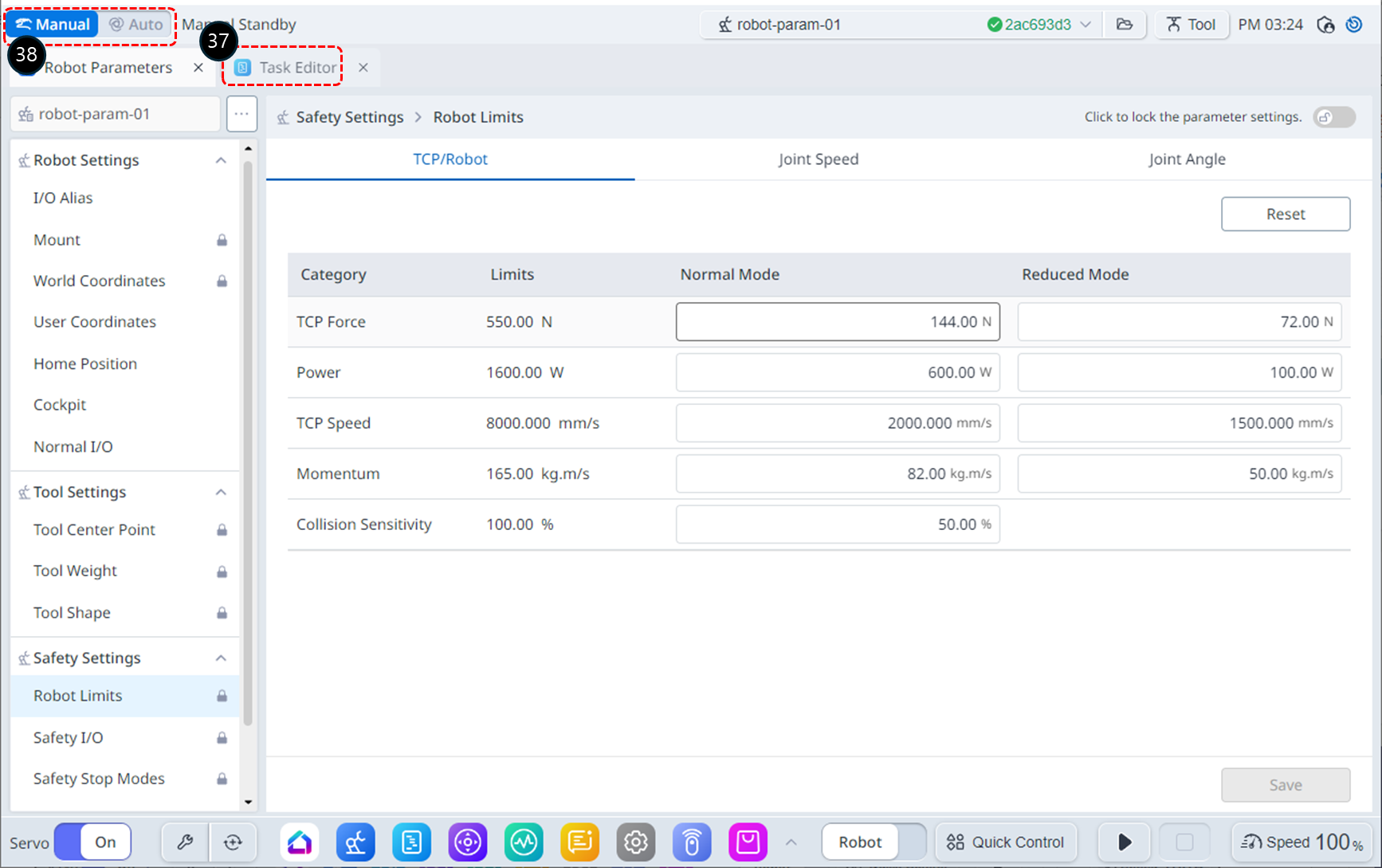
Vyberte kartu modulu Editor úloh.
Přepnutím do automatického režimu spustíte program úloh.
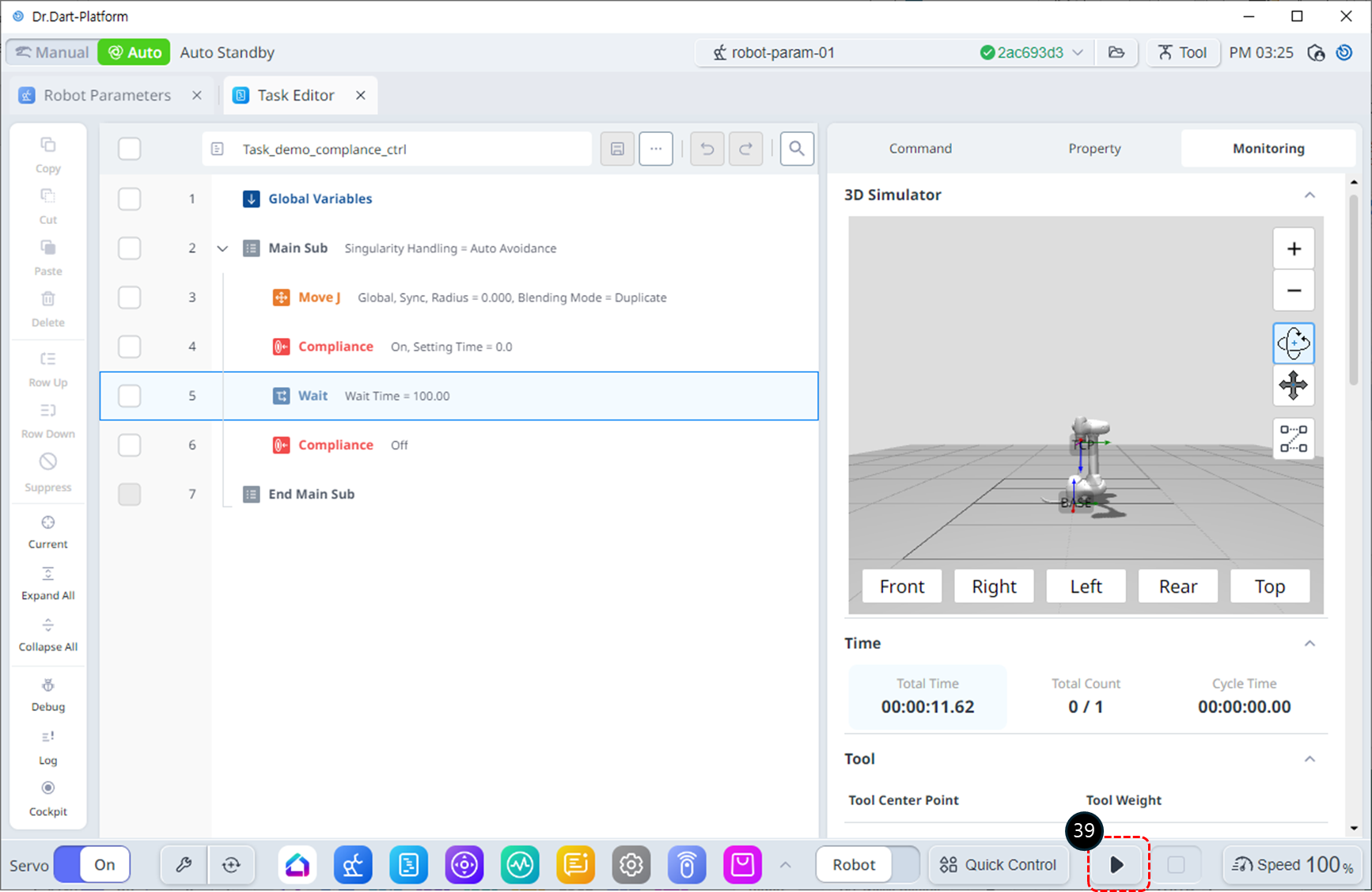
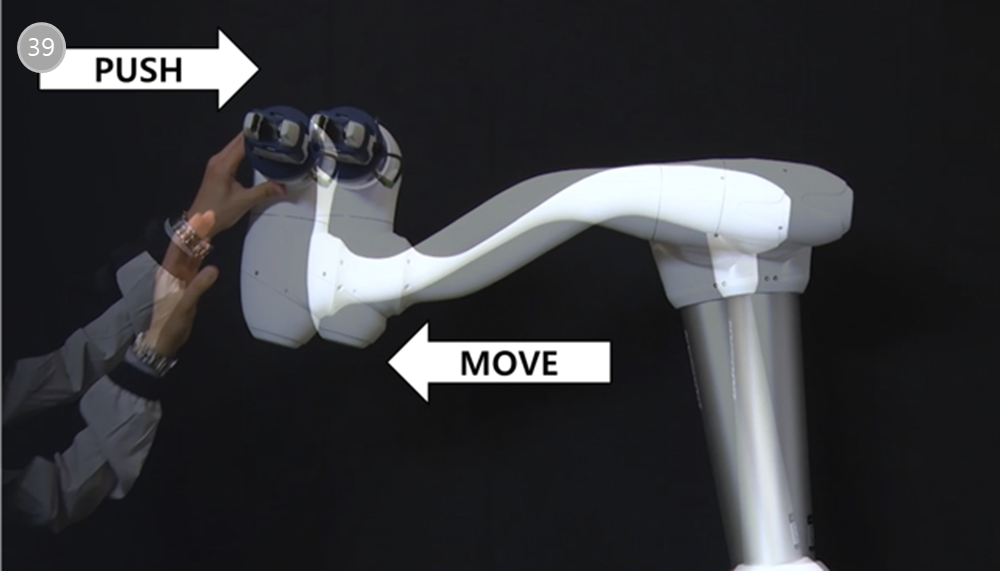
Klepněte na tlačítko Spustit. Během čekací doby jemně zatlačte koncový efektor robota směrem k tělu robota. Robot se bude pohybovat v důsledku tlačení síly, a jakmile uvolníte ruku, vrátí se do své původní polohy.