
Zarovnat panel
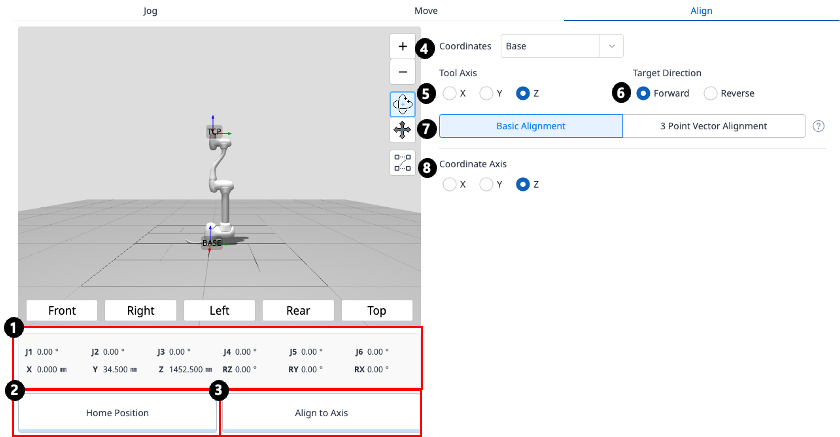
Nabídka
Položky | Popis | |
|---|---|---|
1 | Pozice robota | Zobrazuje pozici kloubu a pozici úkolu aktuálního robota. |
2 | Tlačítko výchozí polohy | Po klepnutí přesune robota do výchozí polohy. |
3 | Zarovnat tlačítko | Zarovná robota při kliknutí. |
4 | Vyberte referenční souřadný systém | Vyberte referenční souřadný systém pro umístění. |
5 | Osa nástroje | Vyberte, kterou osu TCP chcete zarovnat. |
6 | Směr cíle | Vyberte směr, kterým chcete zarovnat protokol TCP. |
7 | Metoda zarovnání | Vyberte metodu zarovnání. |
8 | Osa souřadnic | Vyberte osu referenčního souřadného systému, se kterou chcete zarovnat. |
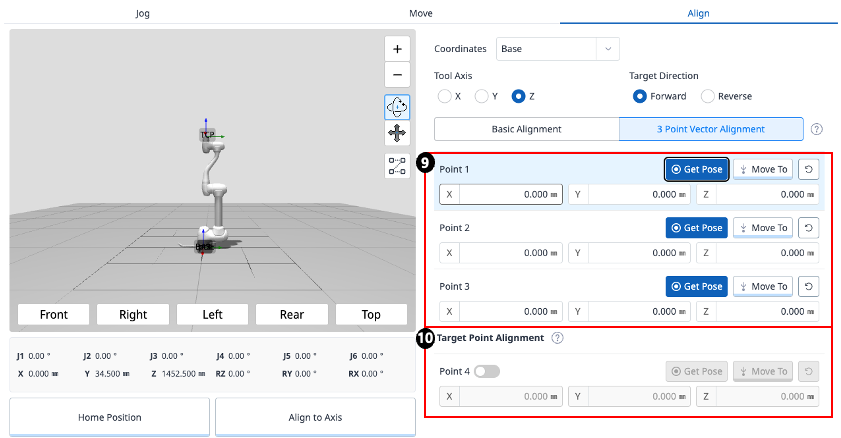
9 | Vyberte body na rovině | Vyberte tři body, které definují rovinu. 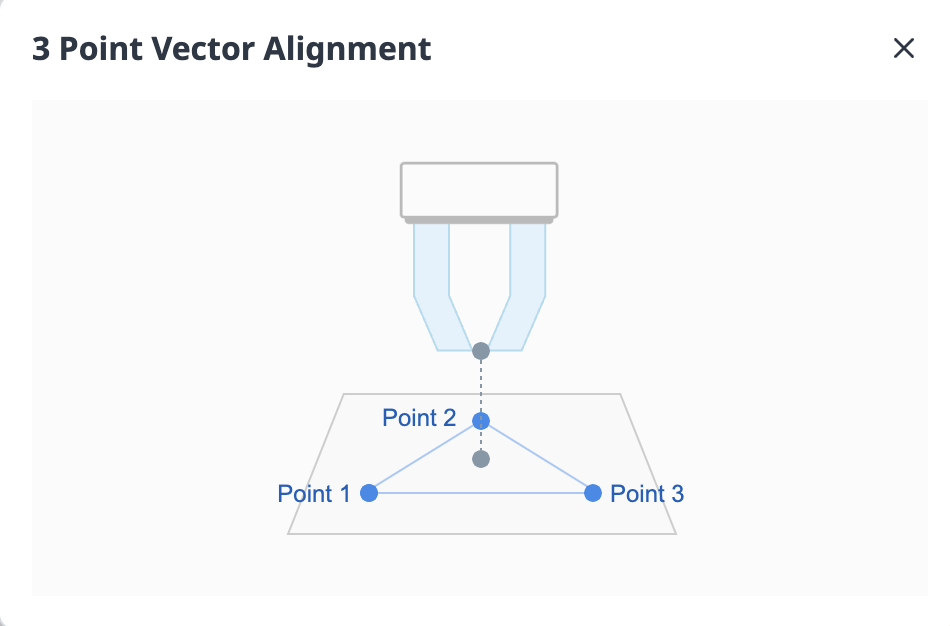 |
10 | Zarovnání cílového bodu | Vyberte bod pro umístění TCP. |