Limity a bezpečnost robotů
Nastavení limitů robota
V limitech robota lze nastavit různé limity související s robotem. Tyto limity se používají k zajištění bezpečného provozu robota v rámci nastavených limitů.
Limity robota lze nastavit v parametrech robota > Nastavení bezpečnosti > limity robota.
Podrobný popis každého limitu naleznete v části limity robota.
Limity robotů jsou do značné míry rozděleny do 3 kategorií. Každá kategorie obsahuje následující obrazovky a funkce.
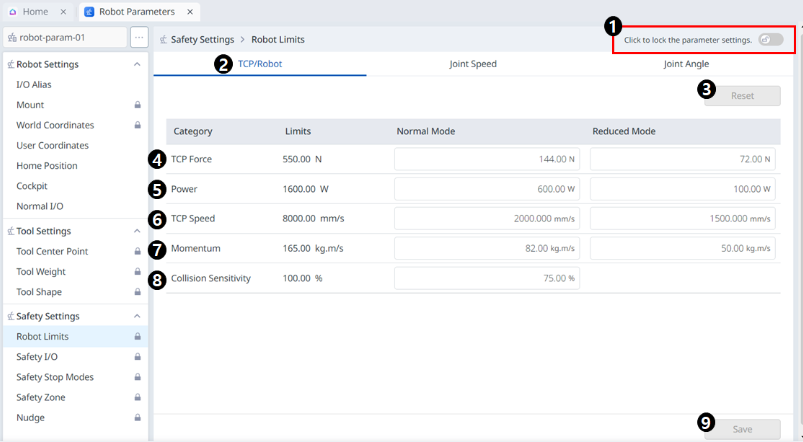
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | TCP/robot | Velká klasifikace limitů robotů. |
| 3 | Resetovat | Slouží k resetování nastavení. |
| 4 | Síla | Používá se k nastavení síly. |
| 5 | Napájení | Používá se k nastavení výkonu. |
| 6 | Rychlost | Slouží k nastavení rychlosti. |
| 7 | Momentum | Používá se k nastavení hybnosti. |
| 8 | Kolize | Slouží k nastavení kolize. |
| 9 | Uložit | Slouží k uložení příslušného nastavení. |
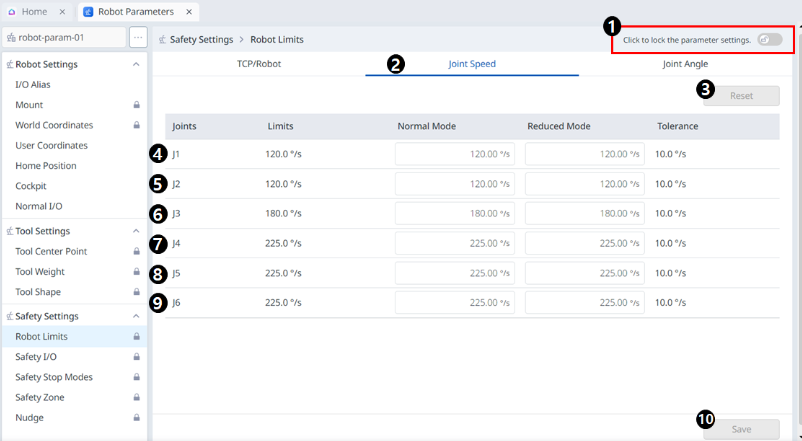
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Rychlost spoje | Velká klasifikace limitů robotů. |
| 3 | Resetovat | Slouží k resetování nastavení. |
| 4 | J1 | Slouží k nastavení pro normální a snížené režimy. |
| 5 | J2 | Slouží k nastavení pro normální a snížené režimy. |
| 6 | J3 | Slouží k nastavení pro normální a snížené režimy. |
| 7 | J4 (neaktivní pro modely řady P) | Slouží k nastavení pro normální a snížené režimy. |
| 8 | J5 | Slouží k nastavení pro normální a snížené režimy. |
| 9 | J6 | Slouží k nastavení pro normální a snížené režimy. |
| 10 | Uložit | Slouží k uložení příslušného nastavení. |
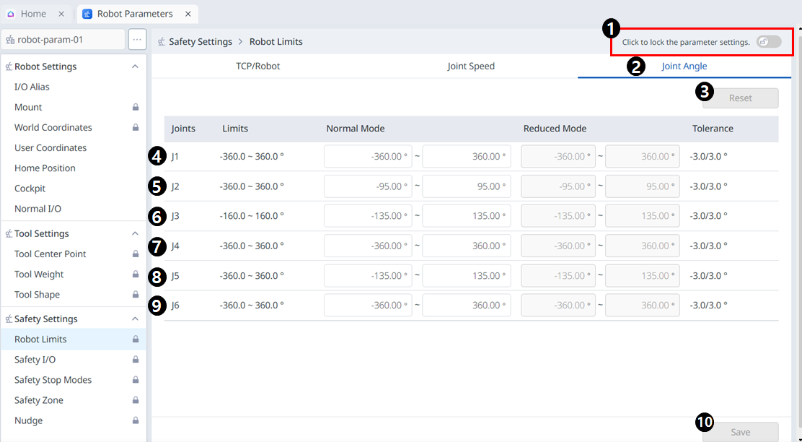
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Úhel kloubu | Velká klasifikace limitů robotů. |
| 3 | Resetovat | Slouží k resetování nastavení. |
| 4 | J1 | Slouží k nastavení pro normální a snížené režimy. |
| 5 | J2 | Slouží k nastavení pro normální a snížené režimy. |
| 6 | J3 | Slouží k nastavení pro normální a snížené režimy. |
| 7 | J4 (neaktivní pro modely řady P) | Slouží k nastavení pro normální a snížené režimy. |
| 8 | J5 | Slouží k nastavení pro normální a snížené režimy. |
| 9 | J6 | Slouží k nastavení pro normální a snížené režimy. |
| 10 | Uložit | Slouží k uložení příslušného nastavení. |
Bezpečnost i /O.
Tato funkce se používá pro vstupní/výstupní bezpečnostní signály do redundantních terminálů. Pokud je některý z bezpečnostních vstupních/výstupních signálů detekován s jiným redundantním signálem, určuje přerušení obvodu nebo selhání hardwaru a zastaví robota v režimu zastavení sto.
Chcete-li nastavit bezpečnostní i /o , vyberte možnost parametry robota > Nastavení bezpečnosti > bezpečnostní i /o .
Další informace naleznete v části bezpečnostní signál i /o .
Vstup
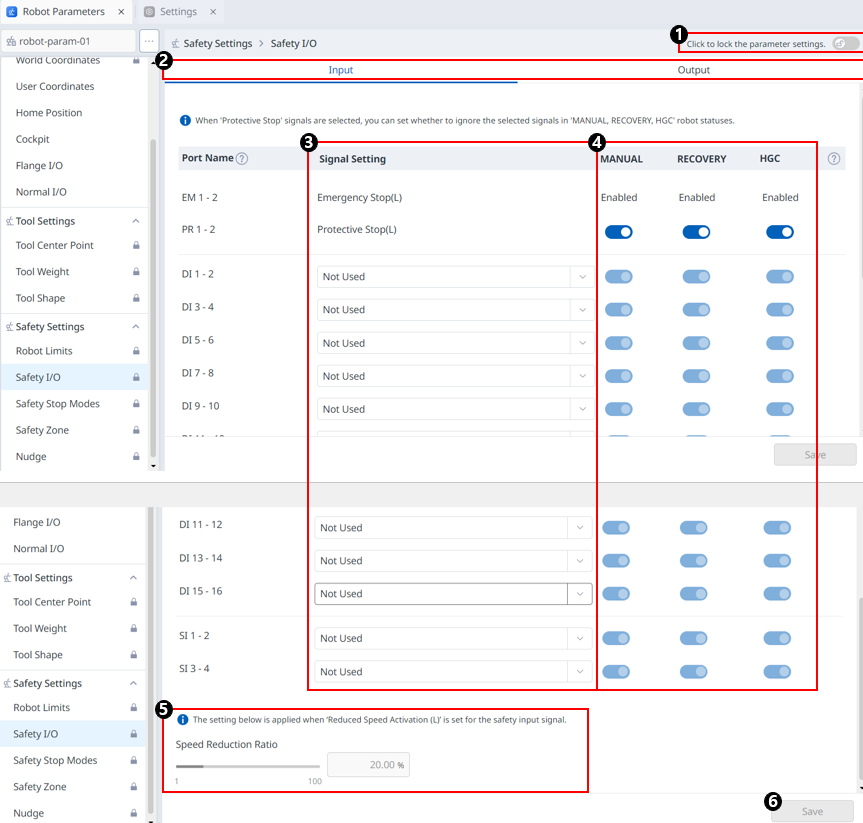
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Vstup/výstup | Pro nastavení lze vybrat buď vstup/výstup. |
| 3 | Nastavení signálu | Nastavení možností pro každý port. Nepoužívá se |
| 4 | Vyberte, zda chcete signál ignorovat v závislosti na stavu robota | Pokud vyberete signál „Ochranný stop“, můžete nastavit, zda chcete vybraný signál ignorovat v robotických stavech „MANUAL, RECOVERY, HGC“. |
| 5 | Nastavte rychlost zpomalení | Můžete nastavit rychlost zpomalení. Může být od 0 do 100. |
| 6 | Uložit | Toto tlačítko umožňuje uložit zadané nastavení. |
Výstup
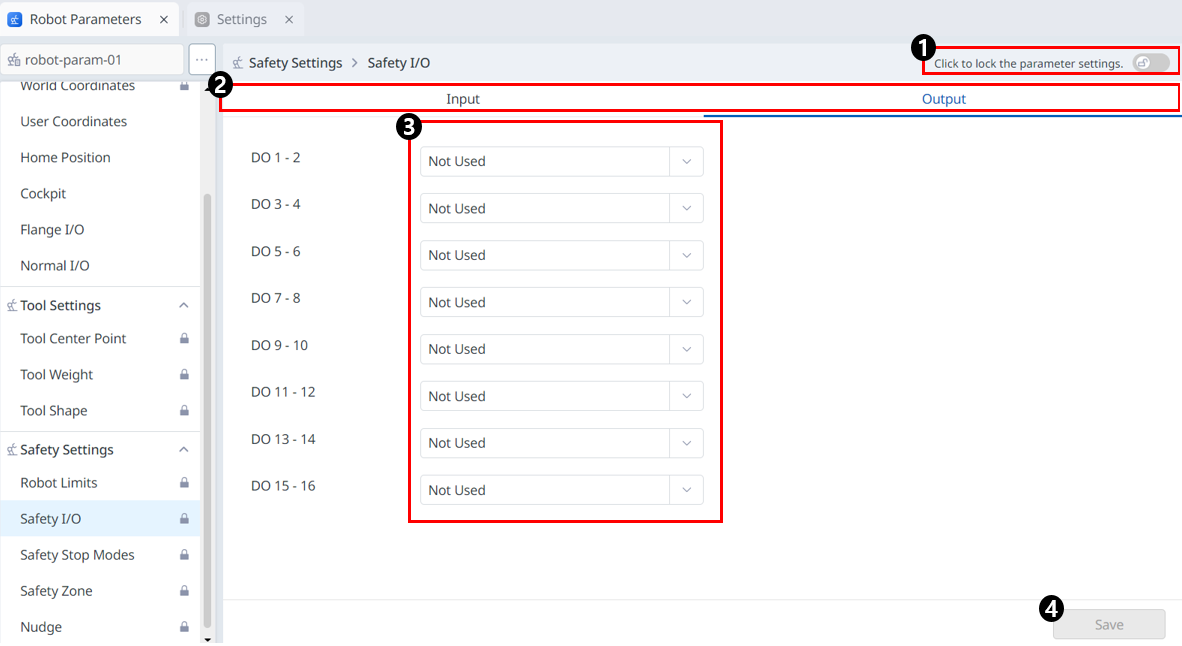
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Vstup/výstup | Pro nastavení lze vybrat buď vstup/výstup. |
| 3 | Nastavení signálu | Nastavení možností pro každý port. Nepoužívá se |
| 4 | Uložit | Toto tlačítko umožňuje uložit zadané nastavení. |
Nastavení režimů nouzového zastavení
Seznamte se s typy bezpečnostních zarážek a s tím, jak zapnout/vypnout bezpečnostní zarážku.
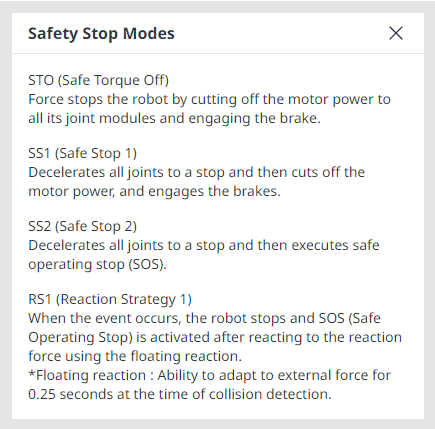
Druhy bezpečnostních zastavení
Režimy zastavení, které jsou k dispozici pro zajištění bezpečnosti uživatele, jsou následující:
Sto (bezpečné vypnutí točivého momentu): Zastaví Servo Off (napájení motoru je okamžitě vypnuto)
SS1 (bezpečný stop 1): Servo vypnuto po maximálním zastavení zpomalení
SS2 (bezpečný stop 2): Pohotovostní režim po maximálním zastavení zpomalení (pauza)
RS1: Při kolizi splňuje směr opačný než kolize a poté vstoupí do pohotovostního režimu (lze nastavit pouze v případě kolize detekce/porušení limitu síly TCP)
Roboty Doosan Robotics mají dva typy funkcí bezpečnostního zastavení. Nouzové zastavení se používá pro všeobecné nouzové situace a robot může po uvolnění nouzového zastavení pokračovat v provozu se zapnut Servo. V případě ochranného zastavení může robot pokračovat v provozu řešením příčiny ochranného zastavení a uvolněním zarážky.
Nouzové zastavení: Nastaví režim zastavení, když je aktivováno tlačítko nouzového zastavení závěsného zařízení Teach nebo dodatečně nainstalovaného externího zařízení
Aktivuje se při stisknutí spínače nouzového zastavení závěsného zařízení Teach nebo tlačítka připojeného k terminálu TBSFT EM.
Lze vybrat pouze sto nebo SS1.
Ochranný doraz: Nastaví režim zastavení, když je aktivováno externě připojené ochranné zařízení
Aktivuje se, když je aktivováno ochranné vybavení připojené k terminálu TBSFT PR.
Další informace o funkcích bezpečnostního zastavení naleznete v části bezpečnostní funkce.
Jak zapnout/vypnout bezpečnostní zarážky
Stiskněte tlačítko nouzového zastavení na závěsném ovladači Teach nebo aktivujte bezpečnostní zařízení připojené k bezpečnostnímu vstupnímu/výstupnímu panelu, abyste aktivovali nouzové zastavení. Bezpečnostní zařízení lze připojit k nouzovému zastavení nebo ochrannímu zastavení prostřednictvím parametrů robota > Nastavení bezpečnosti > bezpečnostní funkce i /o na obrazovce závěsného zařízení Teach.
Další informace o připojení bezpečnostního zařízení k bezpečnostnímu vstupnímu/výstupnímu modulu naleznete v části připojení ovladače i /o .
Informace o nastavení funkce bezpečnostního zastavení pro toto připojení v programu naleznete v části bezpečnostní signál i /o .
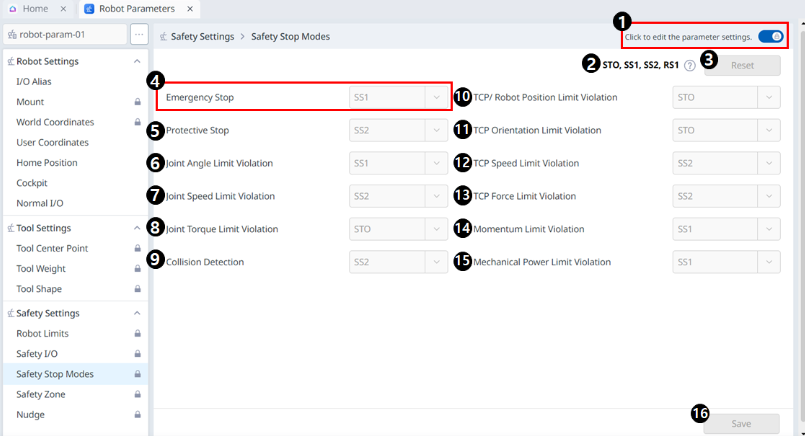
Nabídka
Položky | Popis | |
|---|---|---|
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Informační zpráva | Zpráva s informacemi potřebnými pro nastavení. |
| 3 | Resetovat | Tlačítko pro resetování nastavení. |
| 4 | Nouzové zastavení | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 |
| 5 | Ochranný doraz | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: SS1 SS2 |
| 6 | Porušení limitu úhlu kloubu | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 SS2 |
| 7 | Porušení limitu rychlosti spoje | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
| 8 | Porušení limitu točivého momentu spoje | K dispozici je pouze sto. |
| 9 | Detekce kolizí | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 RS1 |
| 10 | Porušení limitu polohy robota TCP | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: STO SS1 SS2 |
| 11 | Porušení limitu orientace TCP | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
| 12 | Porušení omezení rychlosti TCP | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozbalovací nabídka obsahuje následující položky: Sto (kromě řady H/P) SS1 SS2 |
| 13 | Porušení limitu síly TCP | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
| 14 | Porušení limitu hybnosti | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
| 15 | Porušení mechanického limitu | Pro příslušnou položku lze vybrat bezpečnostní zarážky. Rozevírací nabídky zahrnují: Sto (kromě řady H/P) SS1 SS2 |
| 16 | Uložit | Toto tlačítko umožňuje uložit hodnoty nastavení. |
Poznámka
Na informační zprávě se zobrazí následující překryvné okno:
Poznámka
Od verze 3,2.2 byla některá nastavení sto v režimech bezpečnostního zastavení modelu H změněna na SS1.
Pokud byly používané hodnoty aktualizovány, zobrazí se následující překryvné okno.