
Specifikace robota
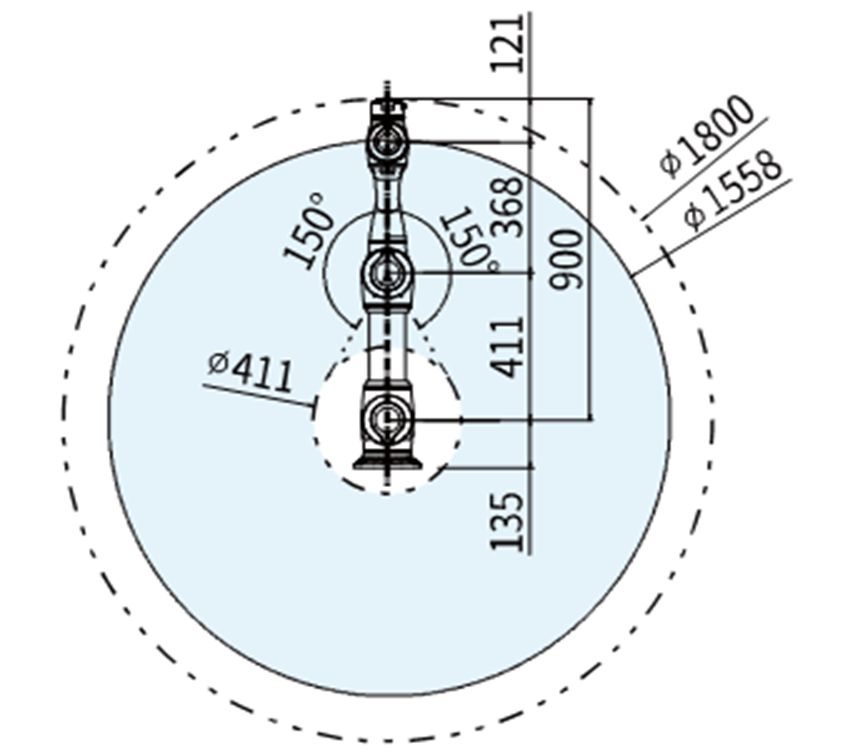
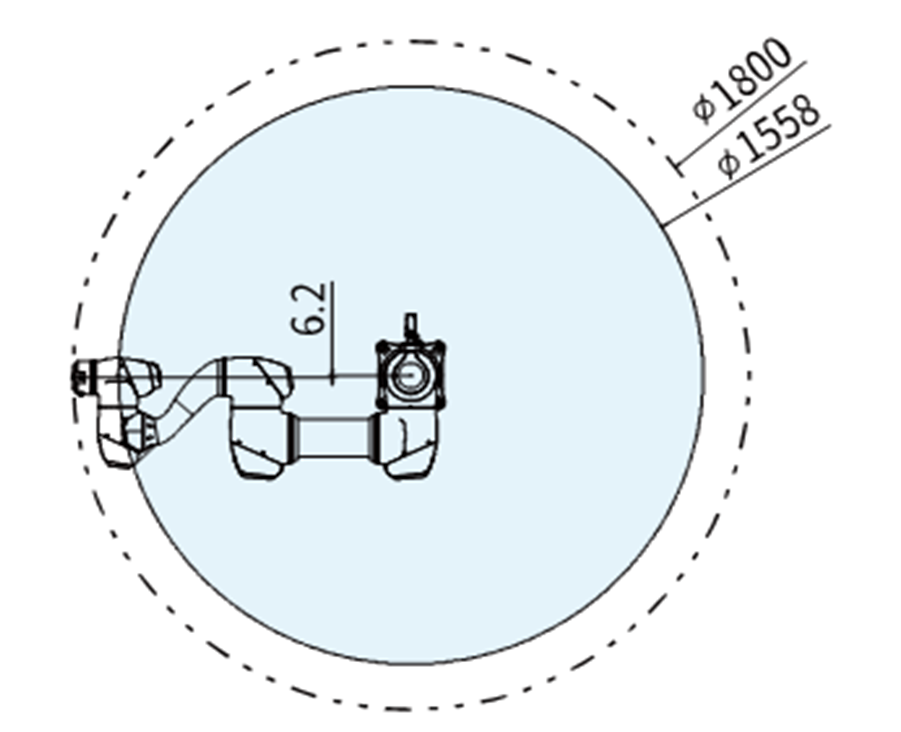
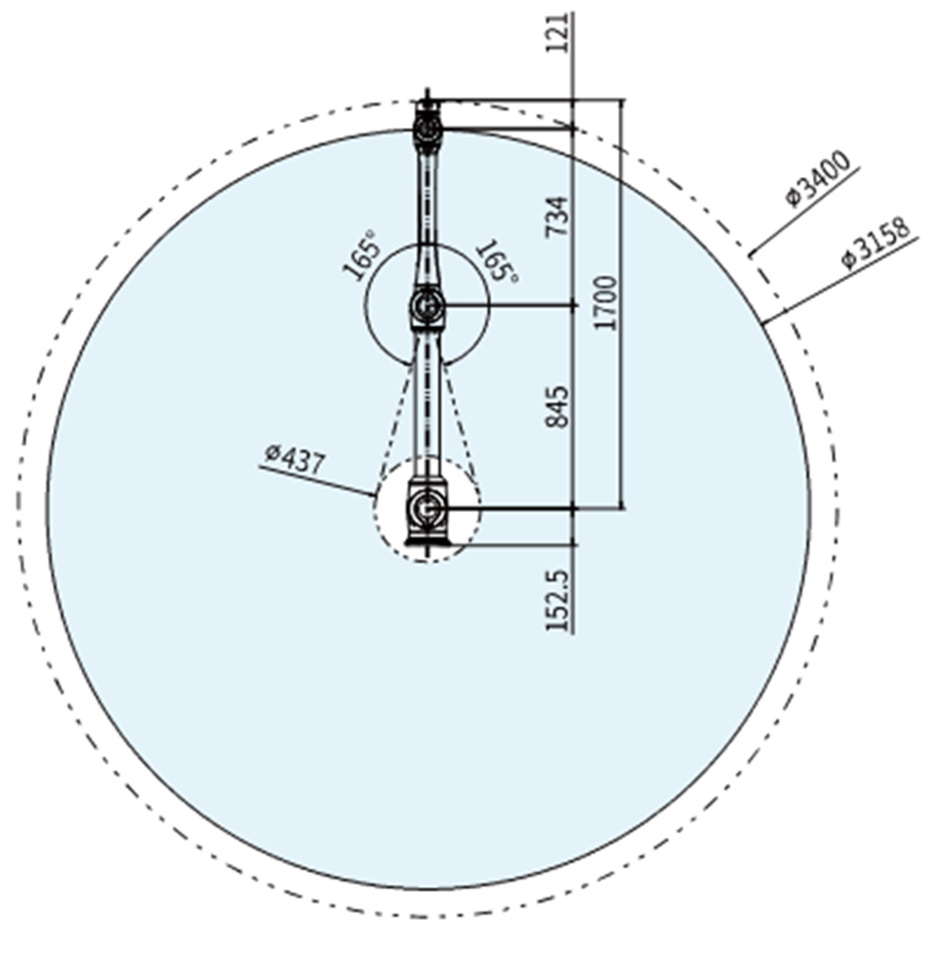
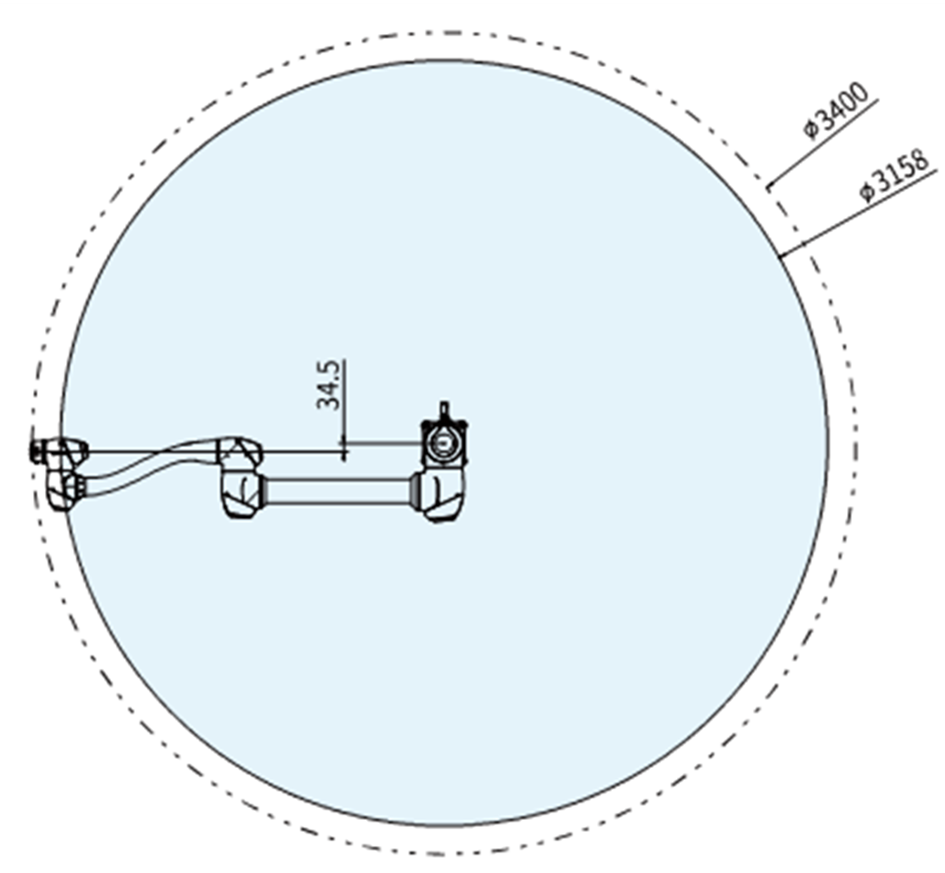
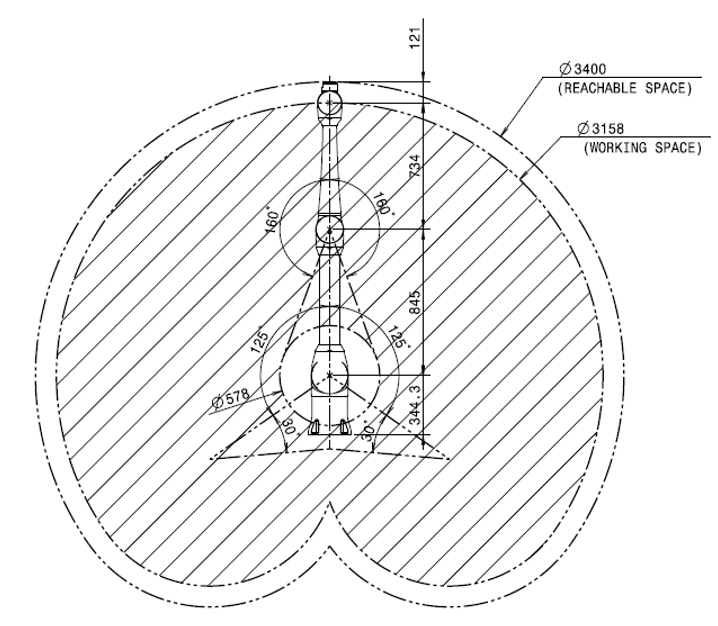
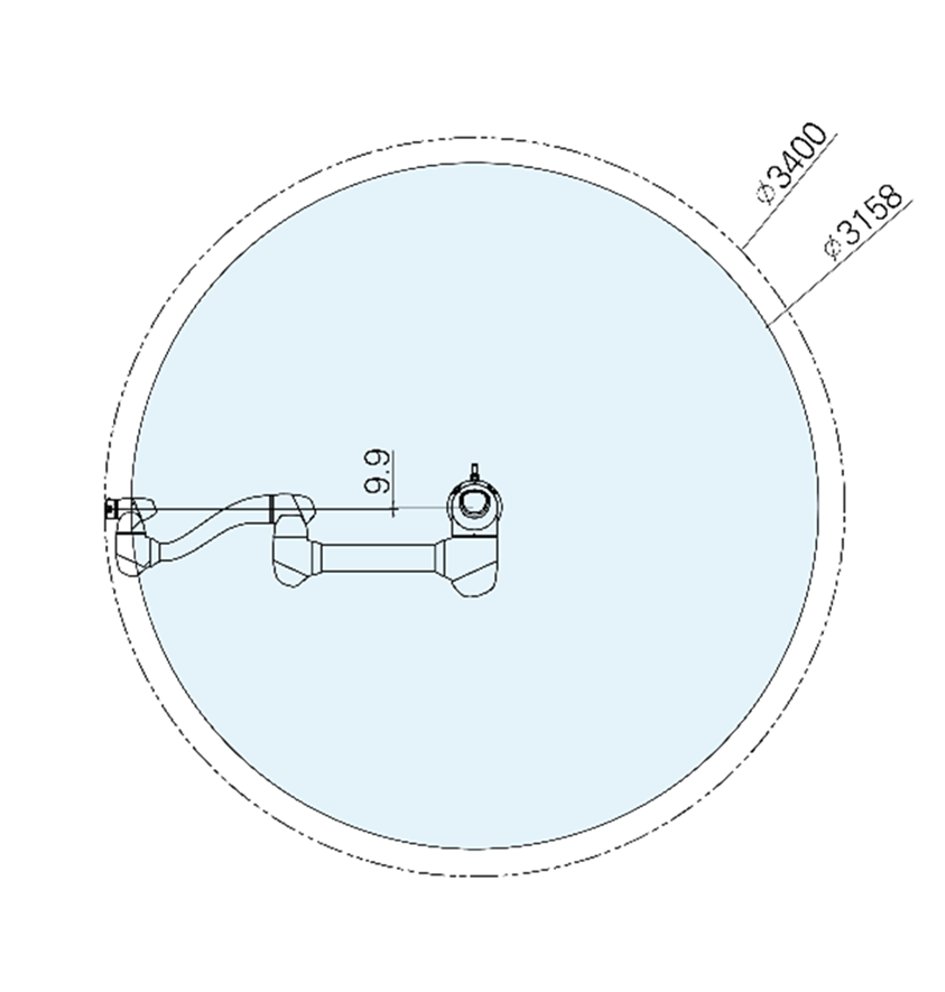
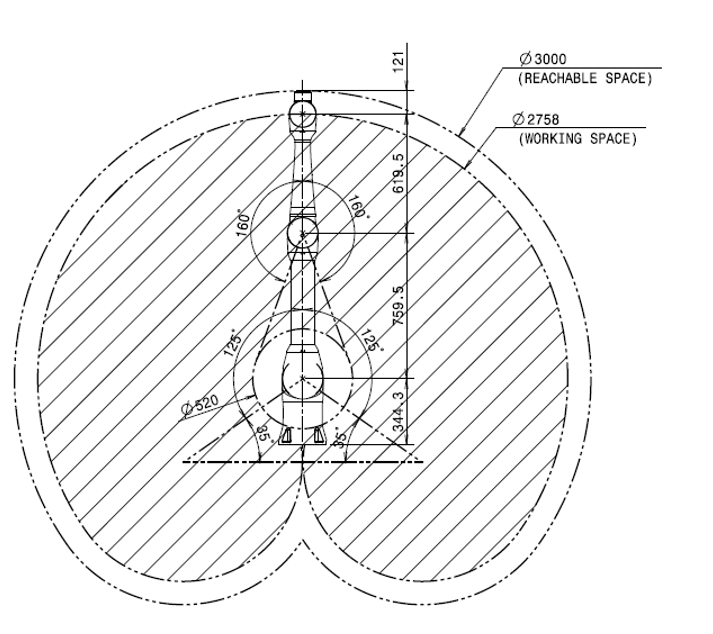
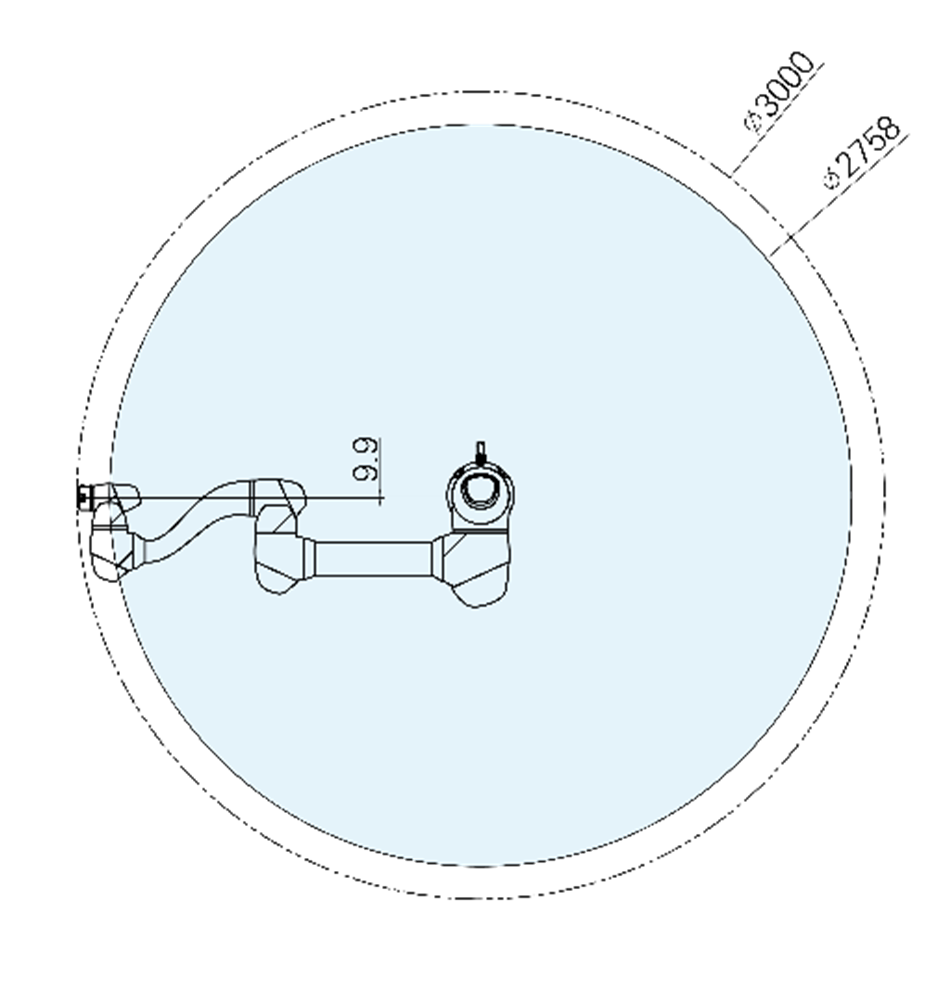
Provozní prostor robota
M0609
 |  |
M0617
 |  |
M1013
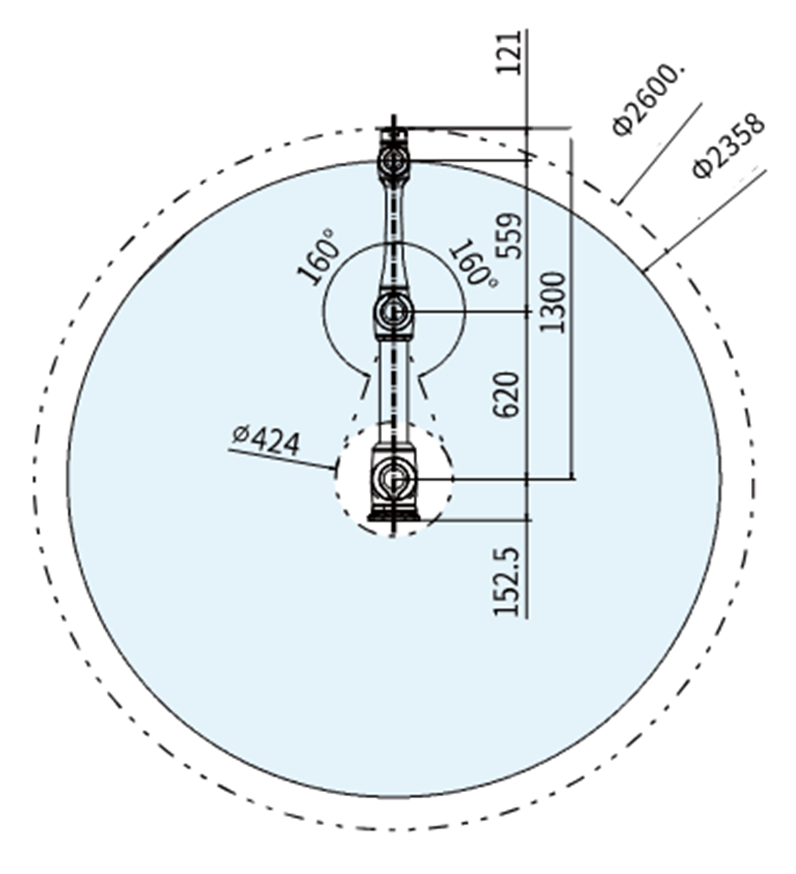 | 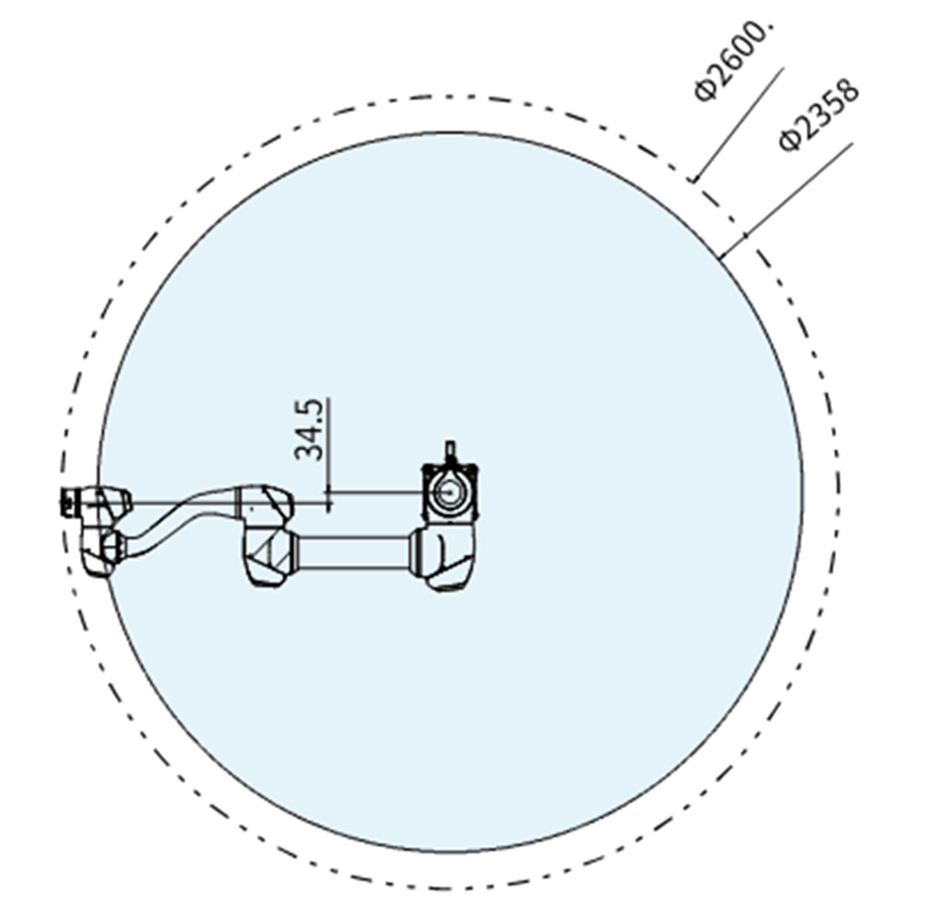 |
M1509
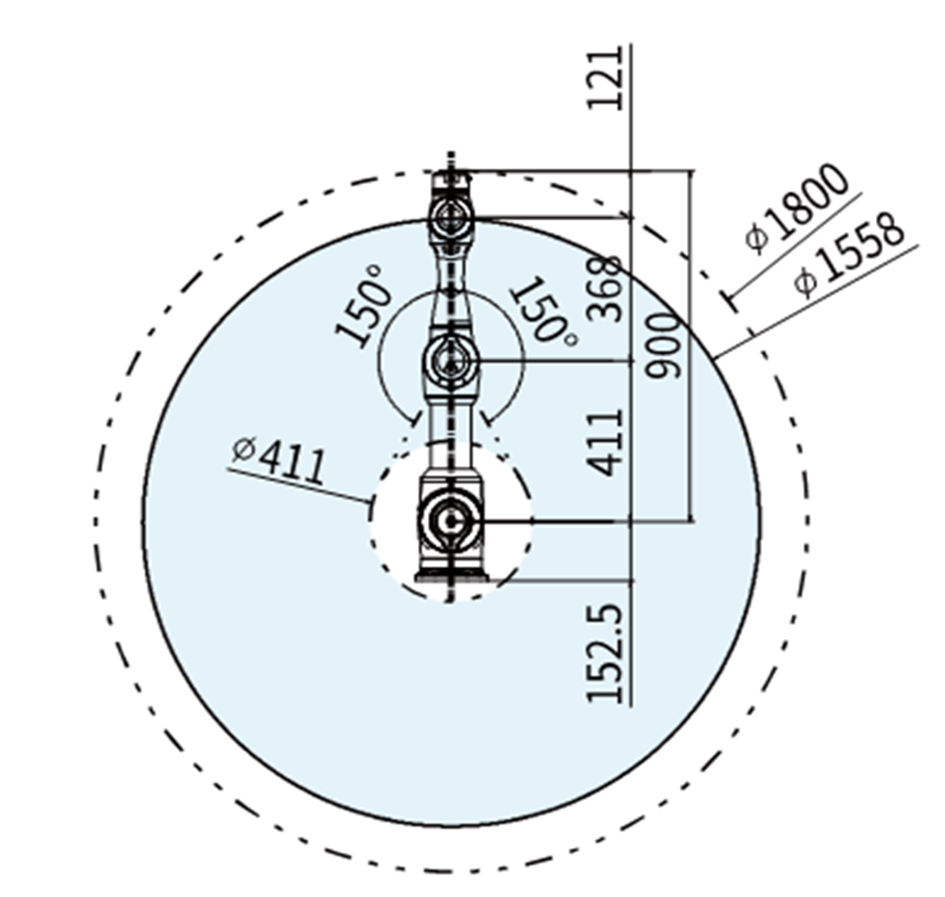 | 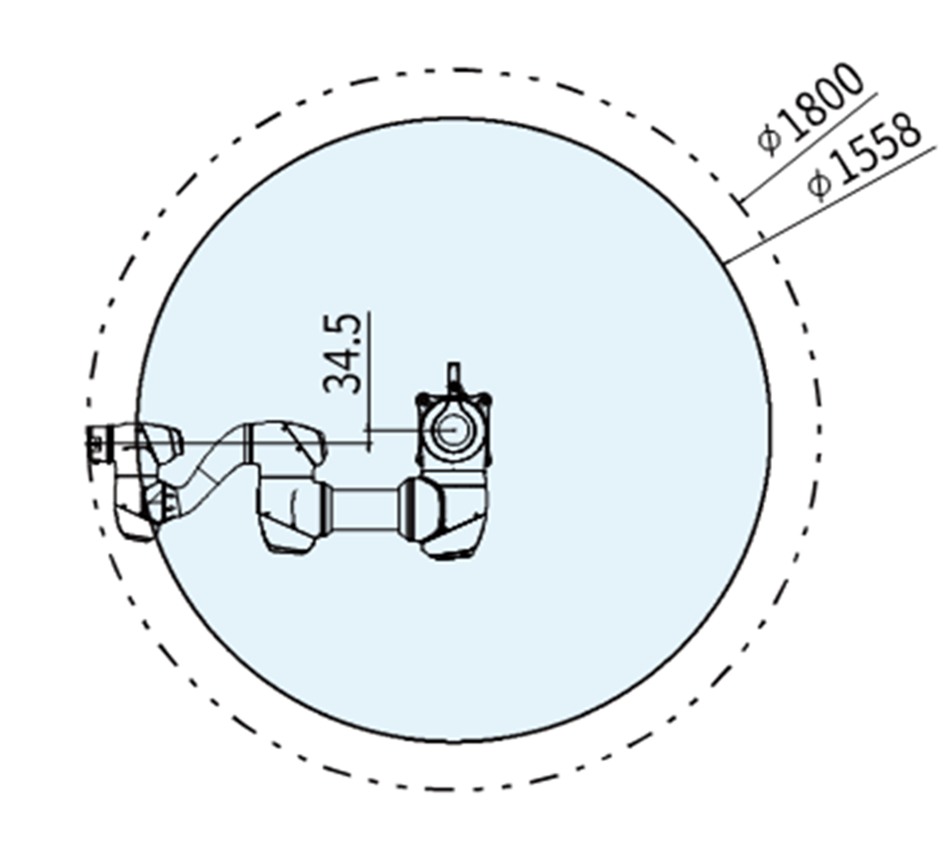 |
H2017
 |  |
H2515
 |  |
Max. Užitečné zatížení v provozním prostoru
Maximální užitečné zatížení robota v jeho provozním prostoru se mění podle vzdálenosti od těžiště. Užitečné zatížení na vzdálenost je následující:
Poznámka
Tento diagram zatížení předpokládá malý objem zatížení nástroje. Nástroje s větším objemem budou mít větší omezení užitečného zatížení nad těžištěm nástroje ve srovnání s nástrojem se stejnou hmotností, ale menším objemem, a v takových případech může dojít k vibracím.
M0609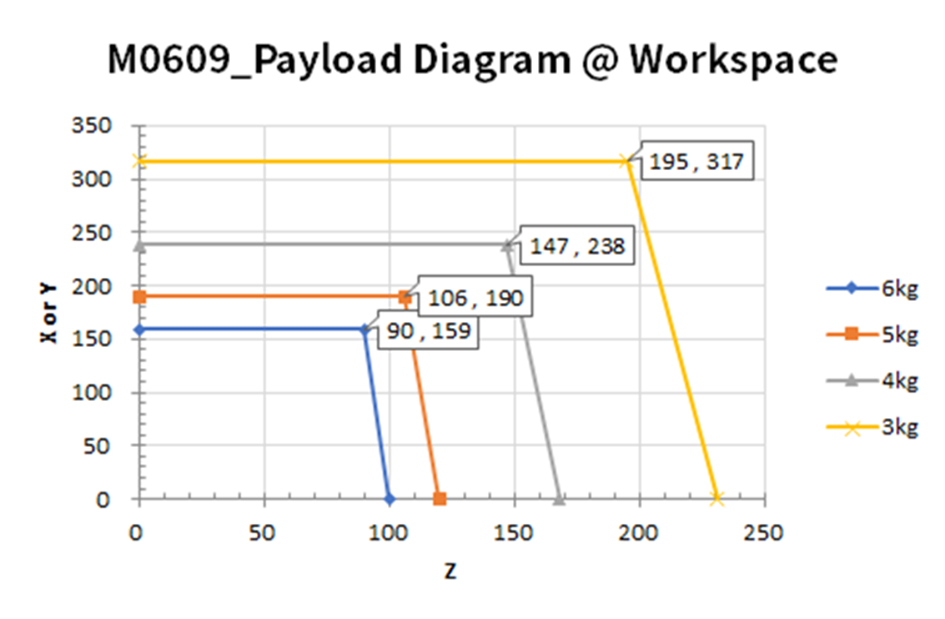 | M0609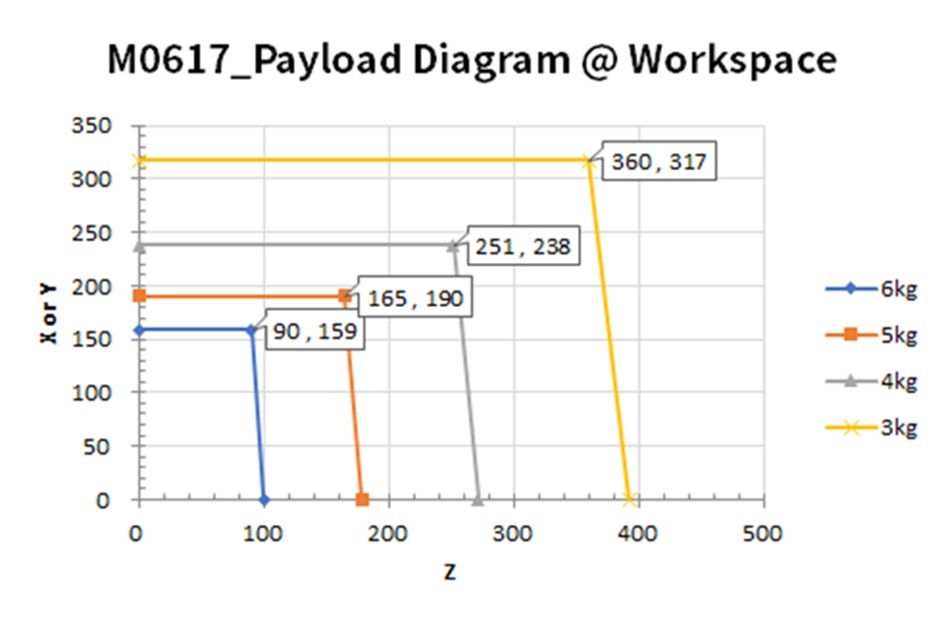 |
M1013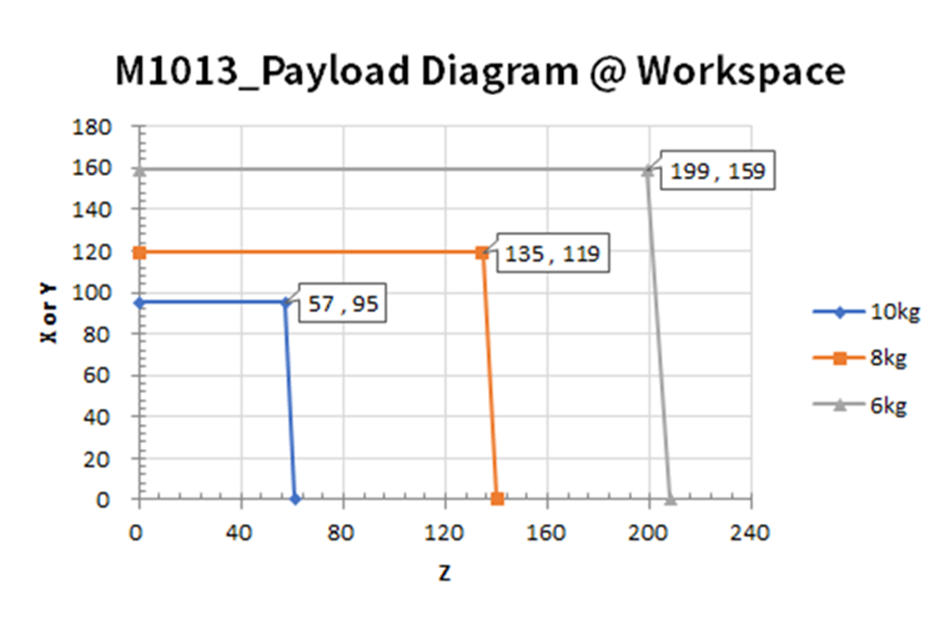 | M1509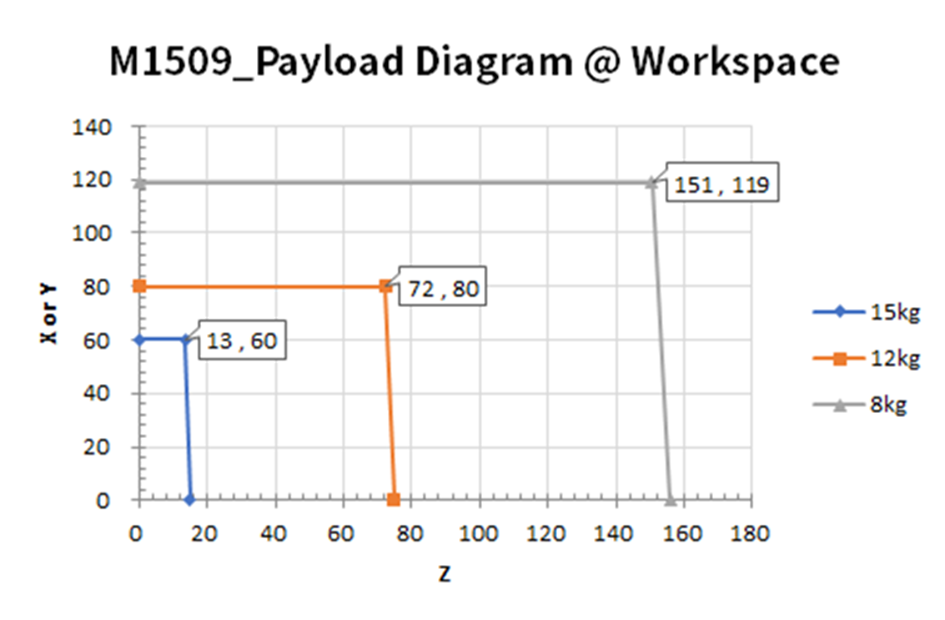 |
H2017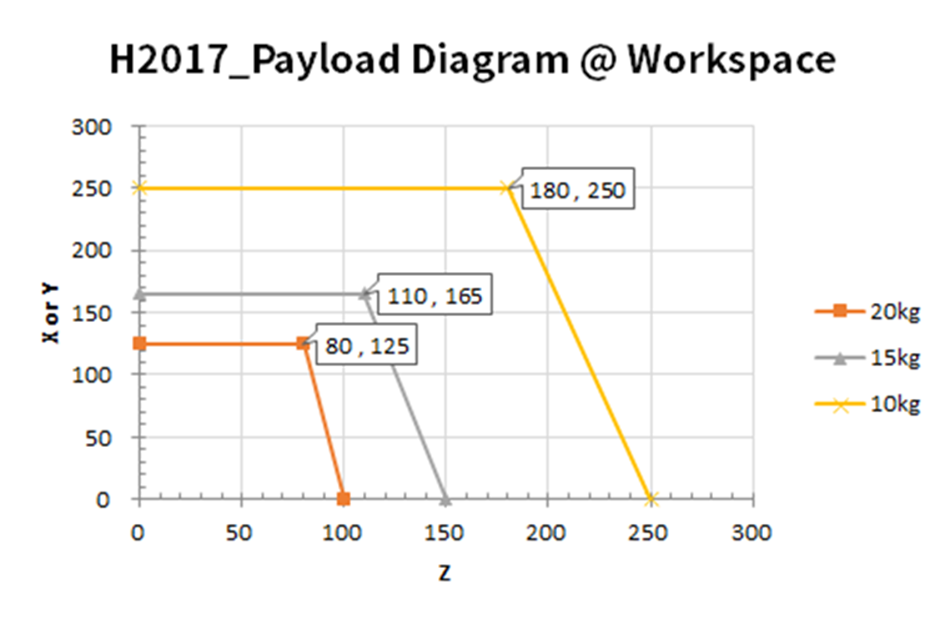 | H2515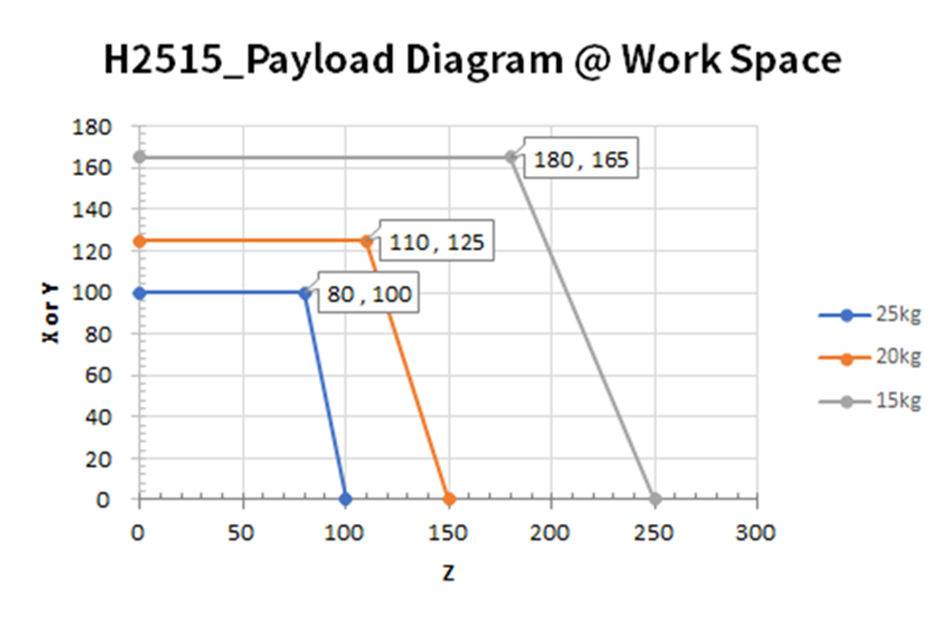 |
Povolený moment a setrvačnost
Přípustný moment a setrvačnost robotu J4-J6 jsou následující:
Název modelu | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
Povolený moment | Setrvačnost | Povolený moment | Setrvačnost | Povolený moment | Setrvačnost | |
M0609 | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ | 36 Nm | 1,6 kg㎡ |
M0617 | ||||||
M1013 | ||||||
M1509 | ||||||
H2017 | 145 Nm | 8,0 kg㎡ | 81 Nm | 4,5 kg㎡ | 36 Nm | 2,0 kg㎡ |
H2515 | ||||||
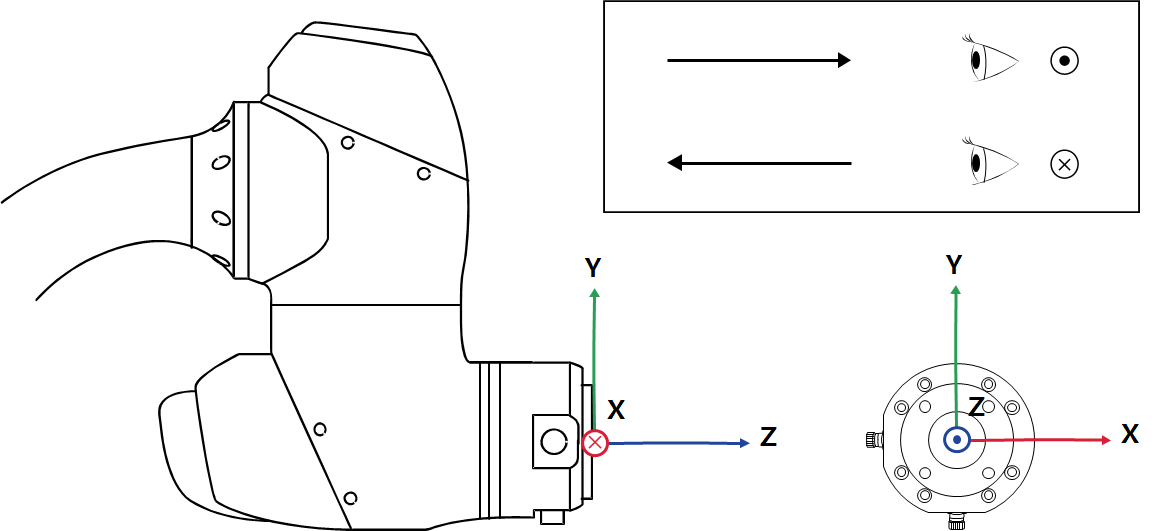
Středový bod nástroje (TCP)
Viz obrázek níže pro TCP.
Základní specifikace
Název modelu | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 | |
|---|---|---|---|---|---|---|---|
Hmotnost | 27 kg | 34 kg | 33 kg | 32 kg | 79 kg | 77 kg | |
Užitečné zatížení v pracovním okruhu | 6 kg | 6 kg | 10 kg | 15 kg | 20 kg | 25 kg | |
Max. Pracovní poloměr | 900 mm | 1700 mm | 1300 mm | 900 mm | 1700 mm | 1500 mm | |
Počet os | 6 | ||||||
Max. Rychlost TCP | Více než 1 m /s. | ||||||
Opakovatelnost polohy (ISO 9283) | ±0,03 mm | ±0,1 mm | ±0,05 mm | ±0,03 mm | ±0,1 mm | ||
Hodnocení ochrany | IP 54 | ||||||
Hluk | < 65 dB | ||||||
Směr instalace | Jakékoli orientace | Pouze podlaha | |||||
Řídící a výukový přívěsek | Doosan Controller & Teach přívěsek | ||||||
Vibrace a zrychlení | 10≤f ㎐ - 0,075mm amplituda 57≤f ≤150㎐ – 1G | ||||||
Dopad | Maximální amplituda: 50㎨(5G)
| ||||||
Provozní teplota | 0 ℃ ~45 ℃ (273K až 318K) | ||||||
Skladovací teplota | -5 ℃ ~50 ℃ (268K až 323K) | ||||||
Vlhkost | 20 % až 80 % | ||||||
Specifikace osy
Název modelu | M0609 | M0617 | M1013 | M1509 | H2017 | H2515 |
|---|---|---|---|---|---|---|
Provozní úhel | ||||||
J1 | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) |
J2 | ±360° (TP: ±95°) | ±360° (TP: ±95°) | ±360° (TP: ±95°) | ±360° (TP: ±95°) | ±125° (TP: ±95°) | ±125° (TP: ±95°) |
J3 | ±150° (TP: ±125°) | ±165° (TP: ±145°) | ±160° (TP: ±135°) | ±150° (TP: ±125°) | ±160° (TP: ±135°) | ±160° (TP: ±135°) |
J4 | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) |
J5 | ±360° (TP: ±135°) | ±360° (TP: ±135°) | ±360° (TP: ±135°) | ±360° (TP: ±135°) | ±360° (TP: ±135°) | ±360° (TP: ±135°) |
J6 | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) | ±360° (TP: ±360°) |
Max. Rychlost na osu (jmenovitá nosnost) | ||||||
J1 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 100 °/s. | 100 °/s. |
J2 | 150 °/s. | 100 °/s. | 120 °/s. | 150 °/s. | 80 °/s. | 80 °/s. |
J3 | 180 °/s. | 150 °/s. | 180 °/s. | 180 °/s. | 100 °/s. | 100 °/s. |
J4 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J5 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |
J6 | 225 °/s. | 225 °/s. | 225 °/s. | 225 °/s. | 180 °/s. | 180 °/s. |