Připojení externích zařízení
Připojení externích zařízení - Vision Sensor
Robot může být propojen s kamerovým senzorem (2D kamera pro měření polohy objektu) a měření kamerového senzoru lze přenést do robota prostřednictvím sítě, která je propojena s příkazy robota.
Nastavení kamerového snímače
Nastavení komunikačního připojení
Připojte LAN porty zařízení a použijte TCP/IP komunikaci pro přenos měření kamerového senzoru do robota. (Viz připojení k síti) nastavte IP adresu snímače VISION na pásmo TCP/IP 192.168.137.xxx tak, aby umožňovala komunikaci TCP/IP.
Pracovní nastavení Vision
K provedení měření polohy objektu je nutné mít obrazový vstup a výuku vidění cílového objektu pomocí kamerového senzoru. Prostudujte si program pro pracovní nastavení zraku, který poskytuje výrobce kamerových snímačů.
Nastavení formátu dat měření
Pro použití údajů o měření kamerových snímačů při práci s robotem je nutné provést kalibraci souřadnic systému Vision- robot, a to musí být provedeno před zahájením práce pomocí programu nastavení kamerových snímačů. Data měření kamerového snímače musí být přenášena pomocí následujících nastavení formátu:
Formát | pos | , | x | , | y | , | úhel | , | var1 | , | var2 | , | … |
|---|
pos: Oddělovač označující začátek dat měření (předpona)
x : X souřadnicová hodnota objektu měřená pomocí kamerového senzoru
y : Hodnota souřadnic Y objektu měřená pomocí kamerového senzoru
úhel: Hodnota úhlu otáčení objektu měřená pomocí kamerového senzoru
Var1 … Varn: Informace naměřené pomocí kamerového snímače (např. rozměr objektu / hodnota kontroly vady) příklad) pos,254,5,-38,1,45,3,1,50.1 (popis: X=254,5, y =-38,1, úhel=145,3, var1=1, var2=50,1)
Nastavení programu robota
Po dokončení fyzického komunikačního spojení mezi kamerovým senzorem a robotem a nastavením kamerového senzoru musí být nastaven program, který umožní propojení kamerového senzoru a robotického programu. Pomocí Doosan Robot Language (DRL) je možné připojit/komunikovat/ovládat funkce externího kamerového senzoru a je možné nastavit program ve zapisovateli úloh.
Podrobnosti a komplexní příklady jazyka Doosan Robot Language (DRL) o funkcích externího kamerového senzoru jsou uvedeny v programovacím manuálu.
Připojení externího zařízení – platforma DART
Platforma DART je software, který běží na počítači nebo notebooku se systémem Windows OS. Po připojení ovladače a stolního počítače/notebooku přes port LAN jsou všechny funkce závěsného zařízení Teach k dispozici od okamžiku spuštění platformy DART. V tuto chvíli je pro připojení k podřadičům v řídicí jednotce vyžadován následující postup nastavení.
Nastavení vyhledávání a připojení IP adresy
Nastavení komunikačního připojení
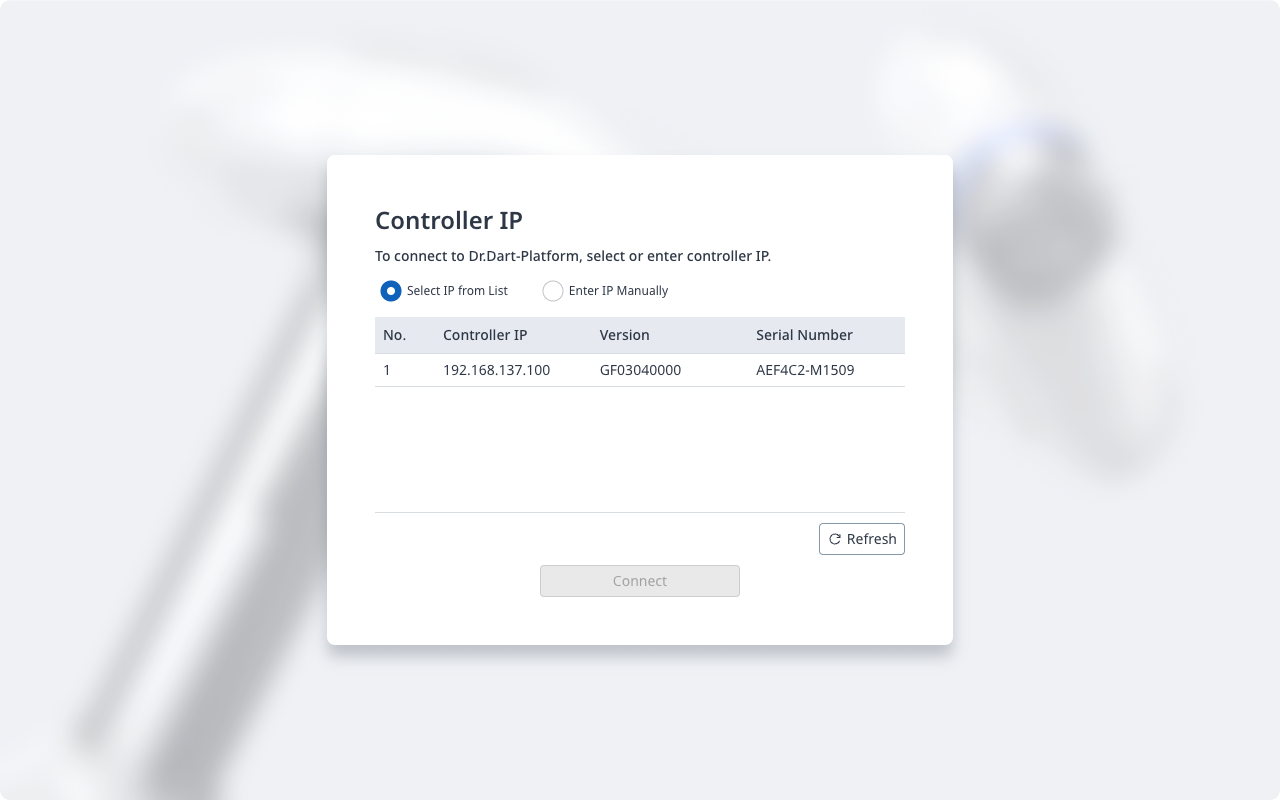
Po připojení notebooku k portu LAN řadiče se automaticky vyhledá IP adresa řadiče, informace o verzi podřadiče a sériové číslo robota potřebné pro navázání připojení.
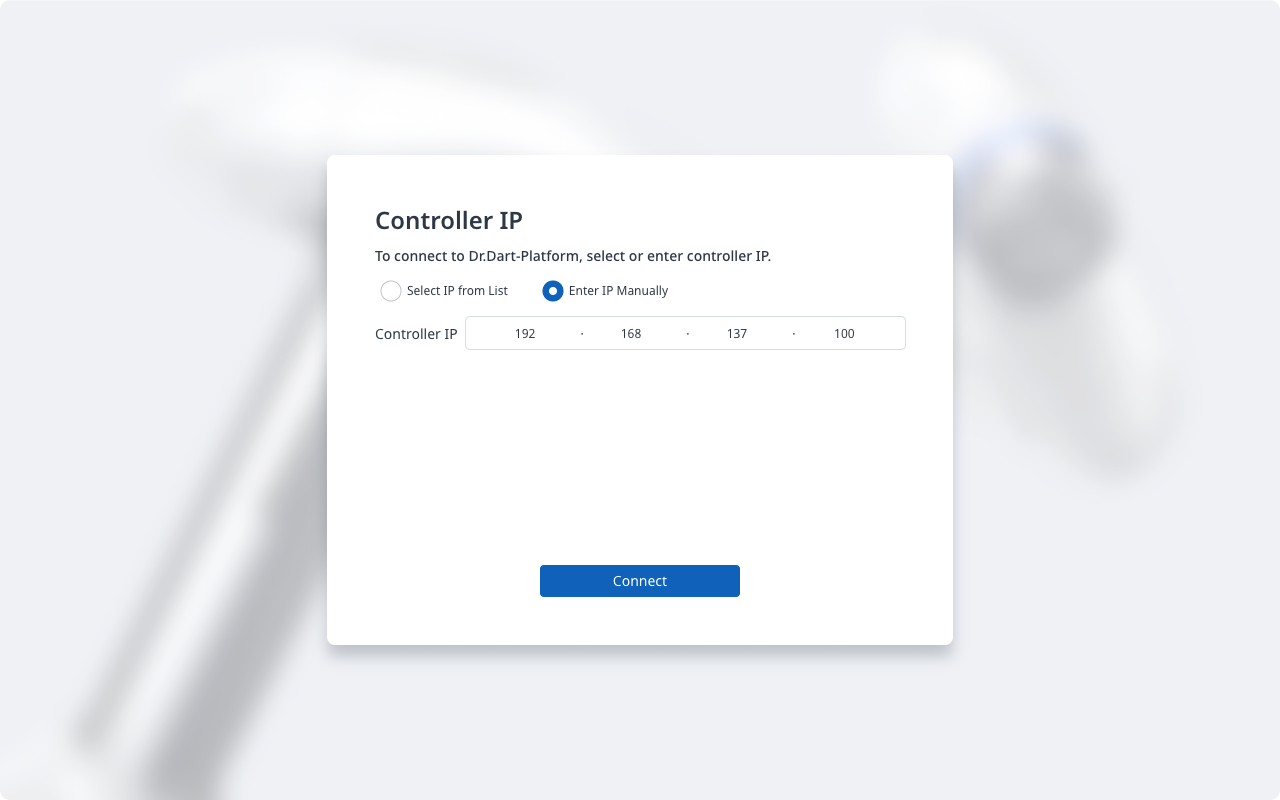
Pokud se hledání nezdaří, stisknutím tlačítka Obnovit obnovte nebo klepnutím na možnost zadat IP ručně zadejte IP adresu řadiče.
Výběr sériového čísla připojeného robota a stisknutí tlačítka Connect vytvoří spojení mezi platformou DART a podřadičem a umožní, aby robot fungoval normálně.
Pokud dojde k problému s připojením, zkuste níže uvedený postup, ale pokud je tento problém trvalý, obraťte se na pracovníky prodeje nebo servisu o pomoc.
Pokud se nezobrazí výsledky vyhledávání pro IP adresu připojitelného řadiče, informace o verzi subřadiče a sériové číslo robota: Stisknutím tlačítka Obnovit znovu vyhledejte a zkuste se znovu připojit podle výše uvedeného postupu.
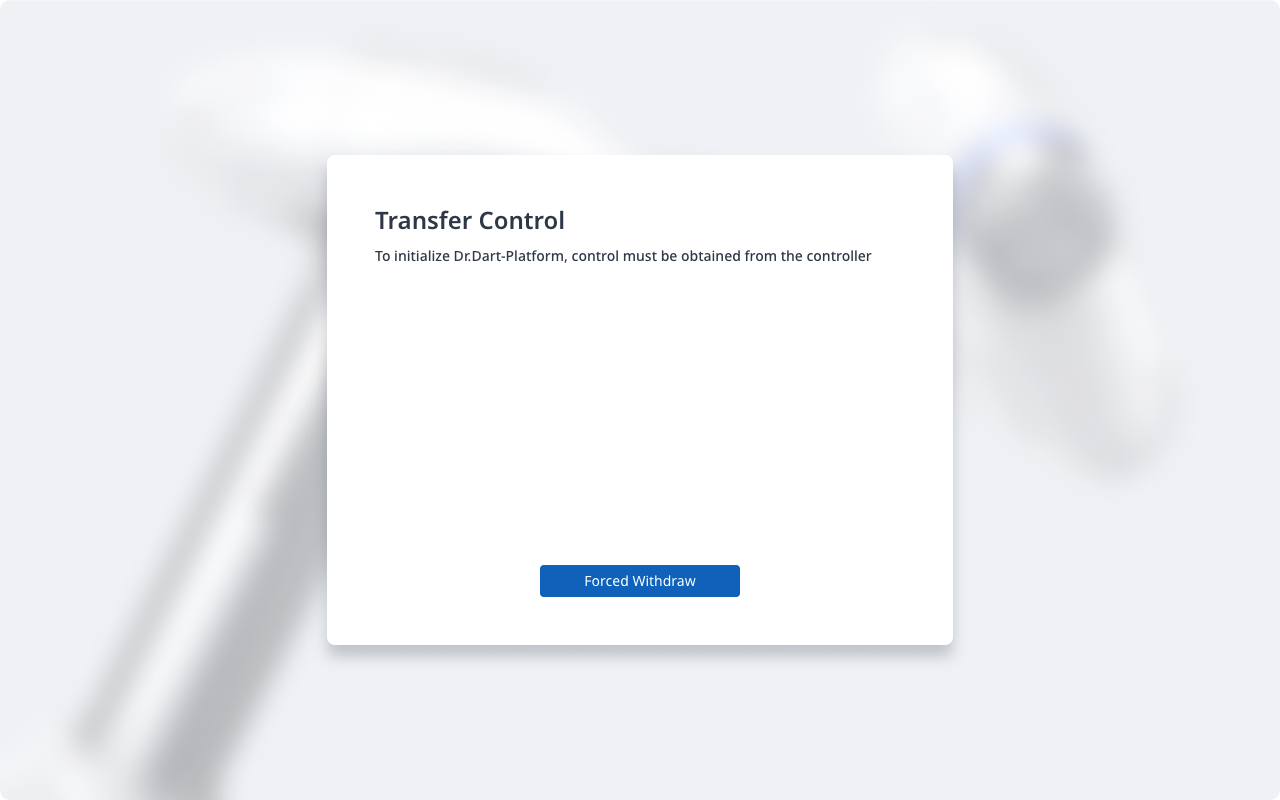
Poté, pokud se zobrazí stránka řízení přenosu, jak je uvedeno níže, klepněte na tlačítko vynucené odebrání a pokuste se připojit k platformě.