
Souřadnice světa
Souřadnice světa robota lze nastavit ze světových souřadnic. V případě, že souřadnice robota jsou souřadnice základny, tento krok lze přeskočit.
Souřadnice světa lze nastavit v parametrech robota > Nastavení robota > souřadnice světa.
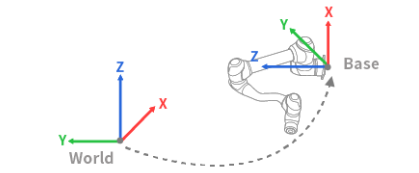
- Souřadnice světa se používají, když je umístění instalace základny robota fyzicky přesunuto/otočeno.
- Změna světových souřadnic bude aplikovat stejný pohyb/otáčení na obrazovku simulátoru robota.
Poznámka
Světové souřadnice mohou být také použity i po změně polohy základny a úhlu po výuce robota. Pokud se souřadnice úkolů vytvořených pomocí učení robotů v minulosti změní ze ZÁKLADNY na SVĚT, bude na všechny souřadnice pohybu aplikován posun odpovídající pohybu/otáčení světových souřadnic.
Rozvržení nabídky
| Položka | Popis | |
|---|---|---|
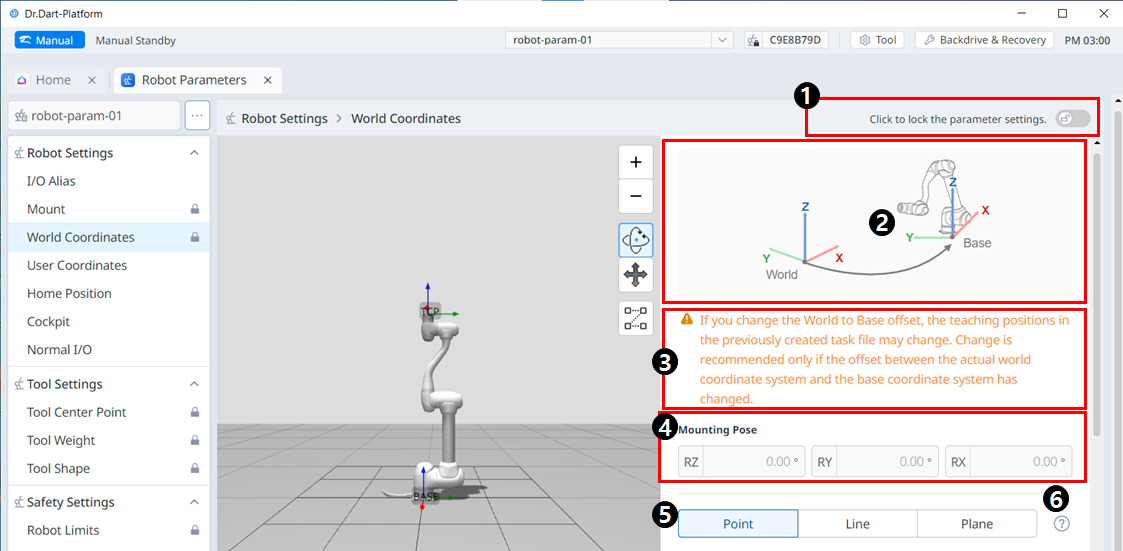
| 1 | Tlačítko pro přepnutí zámku | Slouží k uzamčení nastavené hodnoty. Pro změnu nastavené hodnoty je vyžadováno bezpečnostní heslo. |
| 2 | Informační obraz | Jedná se o informativní snímek potřebný pro nastavení. |
| 3 | Informační zpráva | Toto je informativní zpráva potřebná pro nastavení. |
| 4 | Montážní pozice | Tato část obsahuje hodnoty montážní pozice pro A, B a C. |
| 5 | Nastavení bodu, čáry a roviny | Zde můžete vybrat a nastavit požadované položky mezi bodem, čárou a rovinou. |
| 6 | Výukový průvodce | Toto je návod pro nastavení bodu, čáry a roviny. |
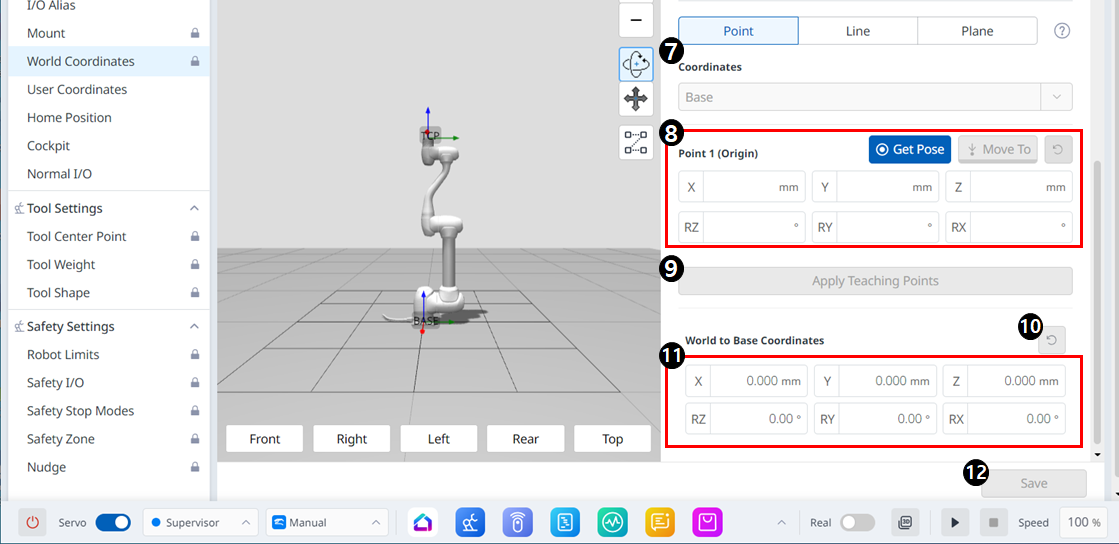
| 7 | Souřadnice | Zde můžete vybrat požadovanou souřadnici mezi základnou a světem. |
| 8 | Nastavení bodu 1 | Zde můžete nastavit nastavení pro každou z 6 os, stejně jako získat pózu a přesunout se na. |
| 9 | Použijte tlačítko výukové body | Toto tlačítko umožňuje zadat požadovaná nastavení a použít je. |
| 10 | World to Base souřadnice Vynulovat | Toto tlačítko umožňuje resetovat již zadané souřadnice World to Base. |
| 11 | Nastavení souřadnic World to Base | Zde můžete zadat nastavení pro 6 osy. |
| 12 | Použít tlačítko | Lze použít hodnotu nastavení. |